

Что такое контроллер для электровелосипеда?
Контроллеры приводят в действие моторные колеса, регулирует скорость и вращение, а также обеспечивает правильную остановку
Контроллер считает одной из главных частей электровелосипеда, так как отвечает за совершенные действия. Он обеспечивает переход тока к электродвигателю.
Такая конструкция позволяет:
- включать и выключать электронику;
- регулировать работу мотор-колес;
- позволяет устанавливать ограничитель скорости;
- осуществляет круиз-контроль;
- ускоряет двигатель до трехскоростного режима;
- отвечает за рекуперативное торможение;
- позволяет всем параметрам отображаться на панели управления;
- осуществление обратного хода.
Главные функции контроллера делят на:
- регулировку движения велосипеда;
- осуществление крутящего момента;
- защищает электродвигатель.
Основные компоненты
Обычно требуется движок на 48 вольт, крепкий велосипед, который его выдержит, немного инструментов и креплений. А также терпение и находчивость, готовность к техническим испытаниям.
- специальный контроллер с программируемым управлением;
- кислотные батарейки для системы питания;
- дисковый тормоз (2 шт.) роторного типа, механический;
- мопедная цепь;
- «звездочка» на 13 и на 66 зубьев;
- переключатели;
- предохранители;
- крепления для мотора из нержавейки.
Далее выполняется модификация колесной вилки и тормозов. Электровелосипед своими руками за 30 минут начинают собирать с передней вилки. Затем надстраиваются двигатель, аккумулятор, резистор.
Некоторые умельцы предпочитают собрать складной велосипед, который за секунды может превратиться из обычного в грузовой или поместиться в багажнике. Разборный вариант удобен по множеству причин – уменьшенный размер колес, легкость перевозки в лифте.

Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.
Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Выбираем контроллер
Главное отличие классического средства передвижения от электризованного – наличие специального регулирующего устройства. Это контроллер для электровелосипеда, который представляет собой коробку, манипулирующую тягой всего агрегата. Если в стране есть ограничение на скорость передвижения на велосипеде, этот прибор поможет установить лимит во время езды. Чаще всего это 25 километров в час.
Конструкция такого датчика не имеет в составе электрощеток.
Выбор двигателя
Самодельный электровелосипед требует установления соответствующей технической надстройки, которая будет облегчать мускульные усилия. Основным элементом всей конструкции является двигатель. Его выбирают в соответствии с нужным напряжением и силой тока.
Перед выбором модели важно учитывать баланс между напряжением и емкостью аккумулятора и напряжением и емкостью движка. Например, при выборе двигателя на 500 ватт и 12 вольт нужен аккумулятор емкостью на 40 ампер в час. Допустимая емкость рассчитывается по закону Ома.
При нормальном уровне разряда аккумулятор прослужит дольше и надежнее. Для экономии энергии лучше разгоняться мускульной силой, стоя на педалях – это позволит сберечь энергию на уровне коэффициента 1,2. Лучше потратить заряд на более сложные участки во время передвижения: на холмы и горки, грунтовую дорогу.

Выполняемые функции
Именно контроллер формирует в обмотке статора мотор-колеса вращающееся магнитное поле и получает ответные сигналы о позиции ротора. Сигналы поступают от датчиков Холла, а при управлении моторами без датчиков позиция роторов определяется по противо-ЭДС.
К тому же, контроллер управляет электродвигателем:
- позволяет менять скорость движения – при смене положения ручки газа меняется число импульсов напряжения, подаваемых за секунду на обмотки, и вращение колеса ускоряется или замедляется;
- обеспечивает рекуперацию энергии при торможении двигателем.
Контроллер выступает в роли понижающего преобразователя, поэтому проходящий по обмоткам мотора фазный ток может быть гораздо выше батарейного тока, поступающего от АКБ к контроллеру. Именно от него зависит мощность, поступающая на двигатель. Например, при использовании мотор-колеса номинальной мощностью 1000 Вт можно кратковременно получать значения до 2000–2500 Вт.
Двигатель и контроллер для электросамоката своими руками
В этой статье я расскажу как в домашних условиях сделать мощный двигатель для самоката или детского электромобиля с высоким КПД и простой контроллер к нему.
UPD 28.06.2020 ——————————>
Вот что в итоге получилось: двигатель описанный в статье ниже без изменений, добавил регулируемый источник питания и курок газа, маленькая батарея в сумочке на руле 8S1P 2,5 А·ч (быстро заменяемая, можно брать несколько с собой, одной такой батареи хватает на 9-12км на средней скорости)

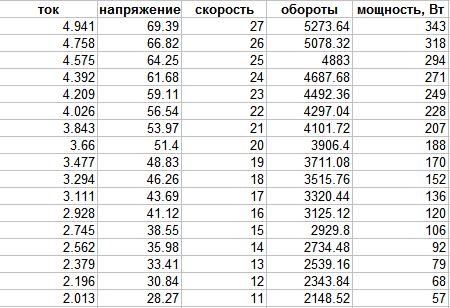
Расход батареи зависит от скорости, прилагаю таблицу расхода энергии для моего веса 85 кг:
Контроллер сейчас полный мост 4 транзистора IRFB4110 установленных без радиаторов, регулируемый источник питания выдает на этот мост напряжение от 25 до 70В при 24-33В на входе с кпд более 93%. Общий кпд системы получился на уровне 80-85% (включая потери на батарее проводах контроллере и двигателе).
<———————— UPD 28.06.2020
Первое что вас шокирует это то, что в этом двигателе не будет железа. Не нужно нарезать пластины статора или ротора на лазерном оборудовании, собирать в пакеты и подгонять всю конструкцию к микронной точности. Это обычно мешает обычным людям создавать самим двигатели. Вы удивитесь насколько проста конструкция и не поверите полученным от нее характеристикам.
Обычно вбивая в поиск на ютубе например «электродвигатель своими руками» вы видите катушку и магнит и это вращается и все знают, что да это работает, но кпд там ничтожный и нормальную тягу создать не может. Но, все ошибаются, на самом деле используя правильно катушку и магнит можно сделать мощный двигатель с высоким кпд.
С чего все начиналось. Когда-то просматривая патенты на двигатели я обратил внимание на двигатель из катушки внутри которой вращался длинный магнитный стержень закрепленный на валу, такая конструкция не приобрела распространение по причине низкого кпд из за слабых магнитов которые были в то время и немного неправильной конструкции. Забегая наперед скажу какой должна быть идеальная конструкция двигателя — магнит сферической формы закрепленный на оси полюсами перпендикулярно оси вокруг него располагается круглая катушка квадратного сечения (через нее проходит ось поэтому можно ее разделить на 2 части и разместить ближе к оси) — все — конструкция готова, остается закрепить все в корпусе и получится двухтактный двигатель. Правда найти такой магнит в продаже мне еще не удавалось но если все начнут делать такие двигатели то скоро появятся.
Сейчас в продаже есть магниты цилиндры диаметрально намагниченные с отверстием по оси, они почти идеально подходят (лучше на сейчас нету), стоят они в общем не дешево но все равно дешевле готовых двигателей раза в 2-5, самые крупные внутри катушки с током (15А 100-200 витков) руками не провернуть уже (за магнит не за ось, а за ось и плоскогубцами не провернуть). Первое опасение мое было когда я запускал такой двигатель на самокате — было, не порвет ли он случайно зубчатый ремень при старте. То-есть понимаете что это уже не те игрушечные двигатели с катушкой и магнитом что вы видите на ютубе.


Теперь о КПД, оказалось все очень просто и предсказуемо, когда магнит цилиндр (сфера) повернут полюсами к виткам катушки то сила магнитного поля действует на магнит по касательной то-есть перпендикулярно к радиусу создавая максимальный вращательный момент а когда он повернут полюсами по оси катушки то момент равен нулю а это означает что в таком положении если подать на катушку ток он весь 100% пойдет в нагрев и кпд вращения = 0%, а когда он повернут полюсами к катушке то кпд максимум и зависит от установившегося тока при определенной нагрузке. Например если в этой точке при напряжении питания 10в установился ток 1А то полное сопротивление (активное реактивное) = 10 Ом и если при этом сопротивление самой обмотки 1 Ом то кпд в той точке 90% (ну и соответственно если сопротивление обмотки 0,1 Ом то кпд 99%). Вывод — обмотка должна быть с как можно меньшим сопротивлением и запитывать ее нужно в тех точках где кпд максимальный их однозначно нельзя запитывать когда магнит повернут вдоль оси или почти вдоль оси так как это 90-100% потери (нагрев). И в этом можно убедится если собрать простой драйвер на 2х ключах (схема в конце статьи) и подать управление от микросхемы с почти любого куллера с 4мы выводами (контроллер управления куллером с встроенным датчиком холла и 2мя выходами которые обычно подключают напрямую к обмоткам). КПД будет на уровне 55% (максимум 72,2% минус потери на сопротивлении зависит от нагрузки на двигатель). Вы уже наверно поняли как нужно повышать КПД, сокращать угол запитки со 180 град до 90 — 45 — 30 — 15, чем меньше тем кпд ближе к 100% но снижается тяга. Где разумный предел, получается при 180 угле потребляем 100 вт отдаем в нагрузку 50-70 вт, если сократить угол до 90 то потребляем 50 вт а отдаем в нагрузку 37 — 44 — (максимум 89,97% — потери) кпд выше но отдаваемая мощность ниже при том же напряжении питания, 120 град (будет аналогично 3хфазному теоретический максимум 86% — потери на активном сопротивлении). Нужен двигатель с большой равномерной тягой и кпд 95%? Запросто — берете 6 магнитов на одну ось со смещением угла катушек или магнитов по 30град получаем 6ти фазный 12 тактный двигатель (аналог 12 цилиндровому двс) с кпд до 97.2% который также можно перепрограммировать на любой другой угол фазы и жертвуя кпд поднимать тягу еще в 2-3 раза при необходимости.
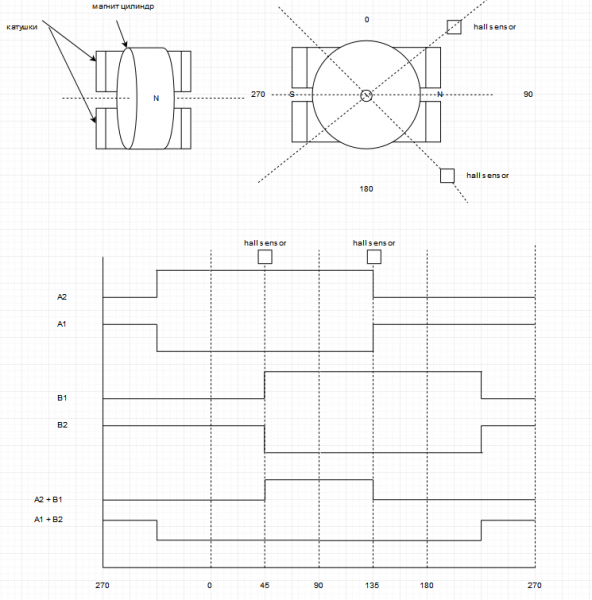
Эскиз ниже показывает конструкцию двигателя и размещение датчиков холла (в примере датчики холла разведены от середины катушки на угол 45 градусов что дает 90 градусов угол запитки обмоток, когда полюса магнита находятся максимально близко к виткам катушки)
Мой двигатель однофазный двухтактный с углом запитки 110 град выдал кпд 87% на скорости 13 км/ч с нагрузкой 92 кг по ровной дороге при этом обмотки заклеенные в закрытом деревянном корпусе за час непрерывной езды нагрелись аж до 41 градуса при среднем потреблении двигателя 88 Вт. Две обмотки по 125 витков в параллель проводом диаметром 0,83 мм, магнит 65 диаметром, 30 высота, внутренний 18 мм ссылка. В сумме меди 260 грамм из расчета на 260 Вт. Мой вес 85 кг (самокат 8кг с двигателем и батареей, легче только из карбона), питание 10х Samsung INR18650-25R = 87 Вт/час (42В максимум с отводом от середины, 2.5 А/ч) мне полного заряда хватает на ~15 км по ровной дороге.
Изначально использовался 1 датчик холла (но я уже тогда знал что это большие потери так как делал такие двигатели и раньше), так двигатель на холостом ходу потреблял 42 Вт (1 А на каждую половину батареи, итого 2*21 или 1*42) и за 2 минуты нагревался до 50 градусов (это без нагрузки), установка 2х датчиков холла снизила ток холостого хода в 10 раз! и он составил 100 мА (4,2 Вт) и греться он перестал. На максимальной нагрузке (езда в горку) ток достигал 6 ампер (>250 Вт) и обмотка разогревалась так что больше пары минут нельзя было ездить а после установки 2х датчиков холла и подачи питания на обмотки только в нужные моменты, согласно рисунку выше, полностью решило проблему перегрева (значительно подняло кпд) и ток при заезде на ту же горку упал в 2 раза (130 Вт)
И так магниты с катушками запакованы в корпус, вал (болт М6 100мм на котором гайками с бортиком, зажимные для колес, через шайбу и резиновую прокладку зафиксирован магнит) закреплен в немагнитных стальных подшипниках (это в идеале, но я использовал обычные дешевые стальные но сила магнитного поля такая что крутятся они с трудом, поэтому лучше сразу нержавейку ставить) и самое главное как его теперь запустить. Я использовал самый простой вариант одна катушка и один магнит — самый дешевый вариант и для самоката подходит идеально, естественно так как запитываем только 90 — 120 градусов сектор на такт то остается незаполненные тягой сектора и стартовать такой двигатель будет с толчка, но это же не вентилятор а двигатель для самоката, оттолкнулся, включил двигатель и поехал, все просто. Если же нужен автопуск то минимум нужно делать 2х фазный 4х тактный, такой поставил в детском автомобиле.
Контроллер
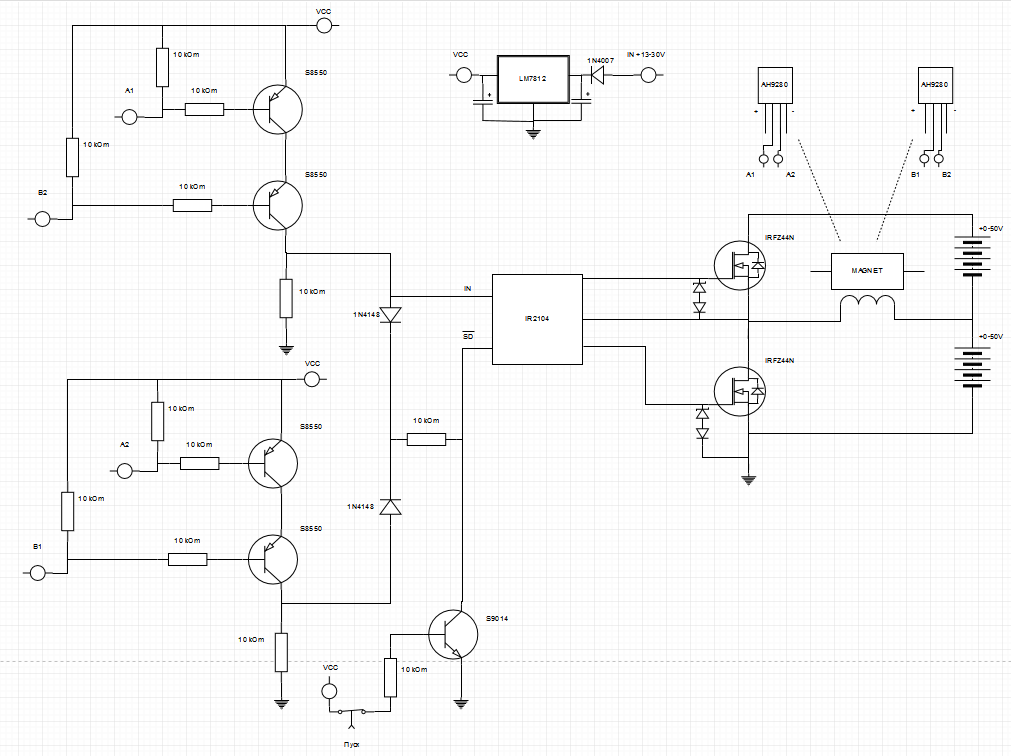
Фраза «шим регуляция» у меня ассоциируется с потерями, запитывать нужно постоянным током чтобы избежать потерь переключения на ключах и не греть диоды в ключах, в общем контроллер может работать с кпд 97% и выше если забыть про шим, а скорость лучше регулировать напряжением питания (например у меня в самокате она фиксированная 13 — 18 км/ч в зависимости от веса ездока). Запитка обмотки двумя тактами возможна или мостом но тогда потери всегда на 2х ключах или полумостом с питанием с отводом от средней точки, выбран именно такой вариант так как в 2 раза уменьшает потери на ключах (всегда катушка включена только через 1 ключ). Еще из плюсов такого полумоста то что обратная эдс при отключении катушки сливается через 1 диод в противоположное плечо и потери на диодах тоже в 2 раза меньше то-есть больше энергии вернется в конденсатор / аккумулятор так же и с рекуперации от скатывания с горки. В итоге получаем полумост драйвер полумоста схема управления.
Схема управления
Использование одного датчика хола не дает возможность управлять углом в котором запитывается обмотка, поэтому нужно минимум 2 датчика расположенные таким образом чтоб получать включение обмоток в нужном диапазоне, проще всего сделать угол 90 град (для этого нужно разнести датчики на 45 градусов от витков катушки в обе стороны) тогда пары датчиков хватит на 4 такта (используем только 2 из них для однофазного) . Каждый датчик возвращает 2 позиции которые означают видит ли он северный или южный полюс, так вот когда оба видят северный включаем один ключ, когда оба видят южный второй, при использовании микросхем от куллера — реализуется логикой 2или-не, на входы двух логических элементов подается питание через сопротивления на выходах при этом 0, микросхемы куллера коммутируют входы логических элементов на ноль, когда оба входа на нуле на выходе 1 — включается 1 ключ, и так же когда на втором логическом элементе оба входа на нуле включается другой ключ. Все просто. Учитывайте при выборе микросхемы драйвера куллера (датчик холла) что они есть с защитой от остановки и без, для двигателя поддержки как у меня на самокате лучше использовать с защитой он запустится только при начале езды, но для двигателя который должен стартовать сам нужно выбирать без защиты и делать ее если необходима другим способом (защита от перегрузки по току например).
Микросхем логики у меня не было потому заменил транзисторами. Схема подключения драйвера мосфетов по даташиту.
Отладка двигателя
Хочу отметить важные моменты которые уберегут детали контроллера от случайного выжигания. Дело в том что обратная эдс с катушки очень коварная штука, она может спалить всю электронику и драйвер и микросхемы с датчиком холла. Для предотвращения таких ситуаций обязательно должны стоять конденсаторы по входу питания в которые сливается обратная эдс с катушки (через защитные диоды в мосфетах) при случайном отключении батареи, минимум 1000 мкф 50В с низким esr. Также для предотвращения попадания выбросов высокого напряжения на выход драйвера через обратную емкость мосфета, обязательно в цепи затвор исток должен стоять стабилитрон на 13-15В (что ниже допустимого напряжения затвора 20В но выше управляющего напряжения с драйвера 12В).
При первом включении обмотку лучше подключать через сопротивление ограничивающее максимальный ток (10-50 Ом), переворотом датчиков холла добиваемся вращения в нужную сторону. Также перемещая датчики можно найти позиции где потребление на холостом ходу будет минимальным и работа двигателя тихой. Сильно уменьшать угол запитки не стоит (< 90 град) для двухтактного двигателя, хоть потребление будет и ниже на холостом но создать достаточную тягу будет сложнее так как в меньшие промежутки времени придется вложить больше мощности а это дополнительные потери на контролере и батарее.
Цена
- болт (вал), гайки и шайбы (фиксация магнита и подшипников), немагнитные шурупы (нержавейка, для скручивания корпуса) < 2$
- корпус (брус 1,5м х 80 х 20) = 1,3$
- зубчатые колеса и ремень = 8$
- магнит = 50$
- платы и все детали < 10$
- 10х Samsung INR18650-25R = 38$
Итого, электрификация самоката обошлась в ~110$
Плюсы и минусы
Плюсы:
- двигатель вращается без какого либо сопротивления, что не мешает поездке на самокате как на обычном при отключенном питании
- малый вес
- цена
- высокая эффективность
Минусы:
- нельзя устанавливать такой двигатель вблизи магнитных материалов (приведет к залипанию ротора, использование в корпусе железных болтов тоже недопустимо, только нержавейка или клей)
- нельзя устанавливать очень близко с массивными токопроводящими материалами (торможение вихревыми токами, идеально использовать раму из пластика, дерева, карбона тогда можно ставить где угодно)
- придумайте и напишите в комментариях (низкая скорость не катит, можно поднять напряжение, меня устраивает скорость для езды по пешеходным дорожкам)
Больше фото
Прижатие ремня для большего сцепления с зубчатым колесом

Первые включения (еще с 1 датчиком холла и пониженным напряжением питания 2х8В) максимальная скорость 3-5 км/ч

Настройка положения датчиков (катаемся, меряем потребление, переклеиваем датчик холла ищем оптимальный вариант) на фото оптимальный

Делаем колесный транспорт самостоятельно
С чего начинается сборка всей модели? Для начала стоит определиться с тем, как должен выглядеть результат и каких целей мы хотим достичь с помощью этого транспорта. Можно купить специальный набор для электровелосипеда – он значительно упрощает всю работу по сборке.
Найти необходимые детали и комплектующие можно на распродажах, в магазинах для изобретателей, на рынках с техническими товарами. Электровелосипед своими руками за 30 минут собрать вполне по силам продвинутому школьнику.
Как выбрать контроллер для электровелосипеда – советы
Контроллер выбирают исходя из вида двигателя и аккумулятора. Основными параметрами считаются: напряжение и величина максимального тока.
Двигатель мощностью 350 Вт нуждается в контроллере 36 В 15 А.
Мощность 100 Вт — контроллер 48 В, силой тока не меньше 25 А. Для лучших показателей выбирают модели со значением тока 30, 35, 40 ампер.
Мощность 1000 Вт- контроллер 48 В 30 А. Существуют программируемые конструкции, где можно настраивать ток под собственные потребности.
Оптимальное соотношение скорости колес к напряжению -1 к 0,9. Исходя из этого, можно рассчитать скорость движения: при 36 В передвигаться следует при 32 км/ч, при 48 В — 45 км/ч.
Увеличение скорости изменяет и соотношение, так как имеют место существенные затраты энергии на борьбу с сопротивлением воздуха.
Контроллеры выпускают обычного типа и с функцией программирования. Последние подходят для любителей экспериментов, так как такие конструкции нуждаются в изучении. Программируемые конструкции можно подключить к компьютеру при помощи кабеля или функции Bluetooth. В компьютерном режиме изменяются различные значение тока, углы фаз.
Контроллер является незаменимой частью электровелосипеда. Он отвечает за все главные функции передвижения. Современный рынок предоставляет большой выбор исходя из мощности, напряжения, вида и способа работы.
Для того чтобы выбрать правильную оснастку электровелосипеда, необходимо изучить основные нюансы и возможности каждой модели. Выбор хорошей модели подразумевает большой спектр функций, например, отдельных выход для питания фар, задний ход, различные режимы скорости и мощности.
Как выбрать контроллер для электровелосипеда?
При выборе контроллера для электровелосипеда или другого транспорта на электротяге нужно оценить рабочие характеристики устройства. Ключевые параметры обычно указаны в маркировке. По ней можно узнать:
- рабочее напряжение батареи и мощность мотора (номинал), для применения с которыми предназначено устройство;
- предельный ток АКБ;
- минимум напряжения АКБ, когда происходит отключение контроллера;
- подходящее расположение датчиков Холла в электромоторе – в электрических градусах по отношению друг к другу.
Для расчета предельной мощности контроллера находим произведение допустимых величин напряжения и силы тока. Диапазон мощности у таких приборов широкий. Для велосипедов на электротяге обычно используются модели с номиналом мощности от 350 до 2000 Вт. Для электрических скутеров – от 1000 до 4000 Вт. Для электромотоциклов – от 5000 до 10 000 Вт. Для электромобилей – от 10 000 до 50 000 Вт и более.
Контроллер для электровелосипеда: схема, особенности подключения, советы при выборе
Все конструкции электровелосипедов включают в себя не только электродвигатель, но и отдельную систему управления — контроллер. Он необходим для обеспечения работы электромотора в велосипеде. Контроллер выполняет важную функцию в транспорте и считается «головным мозгом» конструкции.

Мотор-колесо – лучшее решение для электровелосипеда
Чтобы превратить свой велосипед в электротранспорт, можно купить веломотор и аккумулятор. Электродвигатель даст возможность получить возможность иметь непринужденное вращение педалей и переключение скоростных режимов. Обычно в комплекте электродвигателя есть необходимые для его подключения компоненты.

Важно определиться с выбором мотор-колеса – переднее, заднее или два сразу. Для мощного мотора лучше выбрать заднюю ось, если же вы покупаете привод для переднего колеса, то для заднего он обеспечивается периодическим вращением педалей, и такой электровелосипед будет хорош для езды по трудным трассам.
При установке двух мотор-колес вы получите полноценную полноприводную модель, великолепно чувствующую себя и на больших расстояниях, и на мокрой дороге. Если вы купили редукторное мотор-колесо, то при подъеме в гору и вращении педалей вы не будет чувствовать серьезной нагрузки. В любом случае, выбирая мотор-колесо, предварительно изучите его технические характеристики.
Настройка резистора
Электровелосипед трехколесный взрослый или двухколесный одинаково требует наличия ручек газа. Переменный вариант резистора помогает руководить сменой скоростей и количеством оборотов двигателя. Рассчитав мощность переменного тока, берут соответствующий прибор с нужным напряжением.
Обычно стандартный набор для электровелосипеда содержит необходимые детали для сборки. Задача мастера – сделать так, чтобы двигатель останавливался при давлении на ручку тормоза. Для этого берут два алюминиевых кусочка. Один устанавливают на подвижные части тормозов, второй – на неподвижные.
О совместимости
Контроллер, рассчитанный на использование с батареей напряжением 36 В, не стоит подключать к АКБ большего вольтажа. Вначале необходимо вскрыть контроллер и проверить, рассчитаны ли на увеличенное напряжение его компоненты, включая транзисторы и конденсаторы.
О цене
Контроллеры можно купить в разных категориях:
- Дешевые модели, предназначенные для внутреннего китайского рынка. Они не имеют расширенного функционала и просто позволяют ехать. Как правило, бывают 2-режимные, могут работать совместно с датчиками Холла и без них.
- Китайские модели, ориентированные на экспорт. Позволяют подключать дисплеи и обеспечивать беспроводное управление по Bluetooth.
- Устройства производства Германии и США – самые дорогие.
В предыдущей статье нашего блога рассказывается о возможности установки на электросамокат дополнительной батареи.
Правила эксплуатации
Сегодня можно своими глазами увидеть достаточно транспортных средств, собранных умельцами. На них выполняют горные восхождения, опасные трюки, покоряют ущелья. Но можно просто получать удовольствие от хорошей надежной машины, которая получила второе дыхание благодаря двигателю.
Важно соблюдать технологию изготовления электровелосипеда своими руками за 30 минут, но не менее внимательно нужно отнестись к рекомендациям по правильному использованию этого средства передвижения.

Электровелосипед своими руками за 30 минут собрать можно достаточно качественно. Он прослужит многие годы, если соблюдать меры безопасности и грамотно выполнять все рекомендации.
Итак, мы выяснили, как сделать самодельный складной электровелосипед. Как видите, в этом нет ничего сложного.
Преимущества
Знатоки утверждают, что для изготовления модной и прочной конструкции достаточно немного смекалки, купить соответствующие детали – и верный электрический конь готов. Он обладает массой преимуществ:
- на таком транспорте можно прекрасно передвигаться по городу, полному пробок;
- на него не требуются водительские права;
- не нужно горючее, только подзарядка для электроконтроллера;
- он способствует поддержанию спортивной формы благодаря используемой мускульной силе;
- сделанный своими руками самодельный электровелосипед помогает быть независимым от магазинов и рыночных цен.
Средний агрегат достигает скорости до 42 километров в час, а на крейсерской скорости идет под 26 километров в час.

Преимущества установки мотор-колеса
Выбор в пользу мотор-колеса позволит вам быстро и без сложностей собрать свой электровелосипед. Комплекты мотор-колес – это собранные в ступице колеса бесколлекторные двигатели различной мощности.

Достоинства установки мотор-колеса:
- Процесс установки доступен всем велолюбителя;
- Внешний вид вашего велосипеда не подвергается серьезным изменениям;
- Простота доработки – дополнительно необходима только установка аккумуляторного отсека и управляющих органов на руле;
- Бесшумная работа двигателя.
Не пропустите еще один наш материал – о том, сколько стоит электровелосипед.
Программируемые модели и их задачи
 Программируемые контроллеры соединяются по Bluetooth со смартфоном и позволяют настраивать рабочие характеристики – от значений аккумуляторного и фазного токов до углов фазного опережения.
Программируемые контроллеры соединяются по Bluetooth со смартфоном и позволяют настраивать рабочие характеристики – от значений аккумуляторного и фазного токов до углов фазного опережения.
При выборе управляющих контроллеров учитывается и наличие второстепенных функций:
- круиз-контроля;
- обратного хода;
- возможности выбора скоростного режима или мощности;
- рекуперации энергии при торможении;
- отдельного выхода для электропитания фары и габаритных огней.
Разновидности контроллеров управления
Критерий сравнения | Типы | Особенности |
По принципу взаимодействия с электромотором | Для использования с датчиками Холла | Совместимы с мотор-колесами, оснащенными датчиками Холла. |
Для работы без датчиков | Совместимы с моторами без датчиков, определяют позицию роторов по противо-ЭДС. | |
Универсальные | Могут работать и с датчиками положения, и без них. | |
По виду выходного сигнала | Создающие сигналы прямоугольного вида (меандр) | Цена таких моделей – ниже. При их использовании обеспечивается увеличенная скорость, но из-за вибрации обмоток двигатель шумит сильнее. |
Создающие чистые синусоидальные сигналы. | Дороже. Обеспечивают тихую работу мотора и небольшое снижение максимальной скорости – по сравнению с меандровым контроллером при том же напряжении АКБ. | |
Сознающие сигналы в виде «модифицированной синусоиды» или сглаженного меандра. | Менее популярны. | |
По принципу реагирования на сигналы ручки газа | Обеспечивающие управление скоростью, мощностью или крутящим моментом. | |
Разработка схемы
Чтобы собрать электровелосипед своими руками за 30 минут, необходимо минимум умений, но обязательно знание некоторых законов физики.

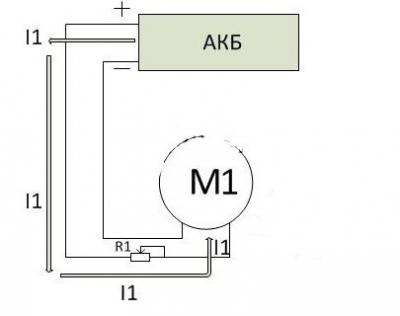
Схема электровелосипеда включает в себя следующие элементы:
- корпус велосипеда;
- источник тока;
- двигатель;
- переменный резистор для введения в разрыв цепи;
- батарею.
Разные схемы позволяют усовершенствовать изобретение и разогнать транспорт до более высоких скоростей при одном и том же аккумуляторе.
Расширение функционала
Широкий ассортимент контроллеров позволяет выбрать прибор, по максимуму подходящий под конкретные цели. Наряду с интернет-магазинами, есть специализированные мастерские, для которых не составляет проблемы вывести из контроллера управления провода под нужные заказчику функции.
Многие печатные платы имеют большой функционал, но в серийно поставляемых моделях он используется только частично. К примеру, у многих моделей не выведен провод для круиз-контроля, заднего хода, рекуперации энергии и других возможностей. Но специалисты мастерской VoltBikes могут вывести провода под конкретные задачи непосредственно при покупке контроллера.
Схема контроллера электровелосипеда
Контроллер внешне выглядит, как коробка, выполненная из алюминия. Внутри неё содержится много цветных проводов. В некоторых моделях конструкцию устанавливают в отдельном боксе, для защиты от загрязнений и повреждения.
Схема контроллера включает в себя:
- Сердце в виде микроконтроллера, расположенное в центре конструкции.
- Преобразователи напряженностью 12 и 5 В.
- Периферия (ручки, датчики).
- Силовые компоненты.
Схема подключения
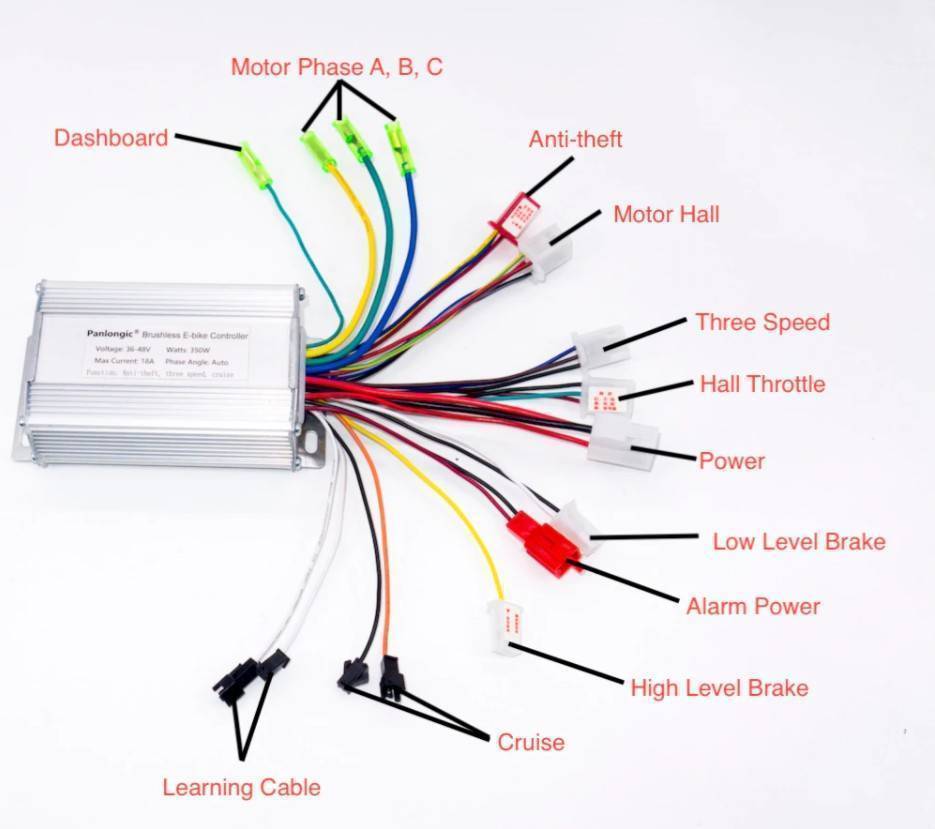
Общий принцип подключения выглядит так:
- Толстые провода черного и красного цвета – с соблюдением полярности подводятся к аккумуляторной батарее. При этом может появиться «искра», и даже возможно подгорание разъемов. Это нормально – так заряжаются конденсаторы на входе контроллера. Чтобы исключить искрение, достаточно ненадолго соединить контроллер и АКБ через резистор с сопротивлением в десятки Ом или воспользоваться лампочкой. Когда конденсаторы зарядятся, контроллер можно спокойно соединить с АКБ без посредников.
- Тройка толстых проводов разных цветов – обеспечивают подключение к фазным проводам 3-фазного электромотора.
- Связка из 5 тоненьких разноцветных проводов – идет к проводкам мотор-колеса, обеспечивают питание и передачу сигналов от датчиков положения.
- Отдельный красный проводок – «зажигание». При его замыкании на «плюс» АКБ происходит включение контроллера.
- Тройка тонких проводов (обычно – черный, красный и зеленый) – для подключения ручки газа.
Схема электровелосипеда

Любой желающий сегодня может купить готовый электровелосипед. Для тех, кому цена на них кажется слишком дорогой, а также для желающих создать оригинальное электрическое средство передвижения самостоятельно, вполне реально переоборудовать свой обычный велосипед в модель на электротяге. Задача эта для людей, обладающих базовыми знаниями в электротехнике, достаточно простая.
Хотите – можно воплотить в жизнь оригинальные идеи и конструкторские замыслы, используя материалы и узлы с барахолок или автомагазинов. Но проще всего получить электровелосипед, приобретя готовый комплект компонентов для электровелосипедов – например, здесь.

Транзисторы и н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току.
Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.
Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением ( или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами.
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание
Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.
Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.
У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.
На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя.
Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях.
При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
A , A–, B , B–, C , C–
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Электробайк. контроллер двигателя своими руками 39
•makarenko•#288534•Гиктаймс
16700
Электровелосипед своими руками за 30 минут. самодельный электровелосипед
Популярность такого компактного, легкого и безопасного вида транспорта, как складной электровелосипед, растет из года в год. Как сделать такую конструкцию своими руками, чтобы сэкономить на покупке?