

Что такое контроллер для электровелосипеда
Контроллер – это сложное устройство, которое выполняет следующие задачи:
- осуществляет преобразование постоянного напряжения аккумуляторов в трехфазный ток для электрического колеса;
- производит регулировку мощности двигателя, в зависимости от силы нажима на ручку газа;
- защищает двигатель.
Обратите внимание! Дополнительно, на некоторых моделях велосипедов, осуществляется обратное преобразование в момент торможения. Эту функцию обеспечивает наличие режима рекуперации и специальных тормозных ручек.
Внешне контроллер выглядит как металлическая коробочка с множеством выходящих наружу проводов. Последние соединяются с ручками управления на руле, аккумулятором, мотор-колесом, датчиком холла и бортовым компьютером.
Во время самостоятельной сборки электровелосипеда часто наблюдается типичная ошибка – контроллер размещается в непроветриваемом чехле. Во время своей работы он сильно нагревается, что может привести к оплавлению проводов и контактов, а также полной поломке устройства.
— контроллер max-e, mini-e —
инструкции — на русском / и английском
Комплекты электроники состоят из:
1. Mini-E или Max-E контроллера:
2. 2,8” монохромного графического дисплея (в базе) 
Основные характеристики контроллеров
- Синусное управление мотором
Компактные размеры
Встроенный ВаттМетер
Дисплей, отображающий всю привычную статистическую и динимическую информацию и позволяющий играть с настройками без подключения к компьютеру, PC-free так сказать.
Полностью настраеваемый реген, а приспользовании нашей ручки газа, аналоговое управление мощностью регена
Антипробуксовочная система
Круиз-контроль
Возможность задавать необходимый пробег — контроллер будет сам расчитывать насколько ограничить мощность для преодаления заданного расстояния
Полуавтоматический подбор комбинации фазных и холловых проводов — делается в ручную, но через дисплей, все что нужно сделать, это правильно подключить питание холлов, остальное происходит электрически
Защита мотора и конроллера от перегрева – термодатчик установлен в контроллере, который также имеет порт для подключения термодатчика, располагающегося в моторе, что позволяет мониторить температуру в нем и соотвествующим образом управлять вкачаваемой мощностью (сначала появляется сообщение на экране, что температура подбирается к критической отметке, затем контроллер ограничивает мощность пока температура не опустится до нужного уровня)
Синусный, блочный и бессенсорный режимы работы (в последний конроллер переходит автоматически, в случае отказа холлов)
Автоматическое отключение системы через заданное время
Самодиагностика системы
Интеграция с БМС — можно мониторить состояние батареи и каждой ячейки в отдельности, устанавливать напряжения верхней и нижней отсечки
Возможность тонкой настройки контроллера:
— коррекция углов холлов
— настройка углов опережения
— и т.д.
3 полностью настраиваемых (мощность, скорость, реген, макс. ускорение) мощностных профиля, переключение между которыми возможно нажатием одной кнопки
Шина подключения дополнительных устройств (БМС, DC-DC преобразователя и второго контроллера для 2WD); несколько устройств могут подключаться одновременно.
Возможность переключения режимов работы ручки газа — контролирует либо мощность, либо скорость. Калибровка линейности ручки и задание прогрессии отклика.
Возможность подключения зарядного устройства к контроллеру (напряжение ЗУ должно быть более 12В и менее напряжения батареи). Опции заряда, в т.ч. установка зарядного тока. Требуется внешняя катушка индуктивности (опция).
Возможность работы как мощный понижающий DC-DC преобразователь. Требуется внешняя катушка и конденсатор.
Блокировка паролем настроек и/или полного доступа к контроллеру.
Для скоростных моторов: развитие скорости до 70000 электрических RPM
При эксплуатации контроллера на больших фазных токах напряжение питания не должно превышать 90v. На экстремальных токах напряжение с учетом просадки батареи не должно превышать 85v.
Контроллер имеет базовую степень защиты IP54 (можно ездить в дождь). От струй воды (например, от мойки) защиты нет. Если нужна полная защита от струй воды — можно крышки контроллера и кабель-вводы обработать герметиком.
Дисплей и разъемы (кроме разъемов силовых проводов) уже имеют защиту IP65, т.е. струй воды не боятся.
Официальные розничные цены комплекта (контроллер дисплей): Mini-e — 13950 руб. /
Max-e — 23950 руб. /
Краткая инфа: на русском
Основные характеристики БМС:
Предназначена для любого типа аккумуляторных батарей до 100В и 32S6P БМС будет состоять из основной платы, к которой может быть присоединено до 8-ми вспомогательных плат каждая на 4S6P. Вспомогательные платы будут оснащены JSTXH коннекторами для упрощения коммутации Li-Po аккумуляторов. На рисунке показаны три вспомогательные платы.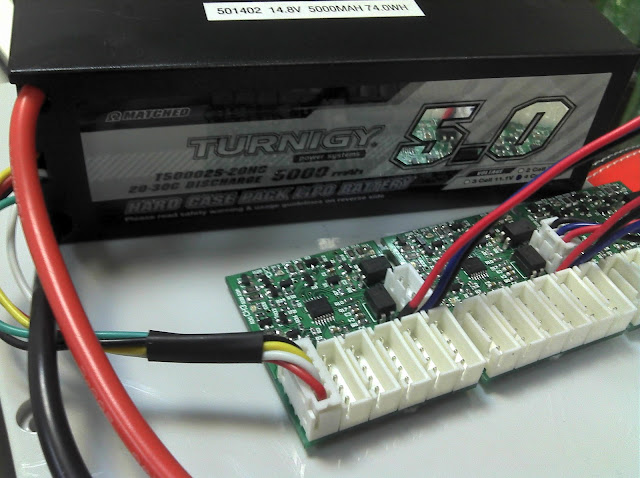
Возможность устанавливать напряжение верхней и нижней отсечки
Может быть использована без контроллера, но с предустановленными настройками
Основные характеристики ручки газа:
Возможность аналогового управления регеном, либо вращением ручки в обратную сторону, либо нажатием правой ручки тормоза. Функция кик-даун для активации профиля максимальной мощности в экстренных ситуациях путем проворота ручки (будет ощутимая ступенька по усилию) 6 назначаемых кнопок
Основные характеристики DC-DC преобразователя:
Входное напряжение 20-100В /
Выходное напряжение 10-90В
Выходная сила тока 10-25 A в зависимости от входного напряжения Выходное напряжение и ток настраиваются через дисплей BMS состоит из основной платы и плат расширения. Плата расширения обслуживает 4 ячейки. Умеет балансировать и измерять напряжение каждой ячейки. Этих плат берется столько, сколько надо для контроля всех ячеек. Максимальная конфигурация — в опытных образцах 32S, но в официальной версии планируется больше.
При использовании контроллера пришли к выводу, что силовая часть в BMS не нужна — контроллер умеет заряжать батарею, так и входить в спячку (режим низкого энергопотребления). Поэтому сделали BMS модульной для возможности набирать требуемую конфигурацию и не переплачивать за ненужное.
Основная плата — плата с процессором, которой для работы нужен либо контроллер, либо силовая плата BMS (если нужно использовать BMS автономно, без контроллера).
Соответственно, работает с lipo, life и др. ячейками с напряжением ячейки от 2 до 5 вольт.
Связаться с нами можно по телефону: (495) 215-2878, в рабочие дни с 11 до 18:30 (поддержка и сервис) Можно позвонить просто из браузера
Мы находимся по адресу ул. Введенского, д.8 (ст.м. калужская или беляево) В случае проблем с начальной настройкой мы осуществляем первоначальную настройку mini-e и max-e контроллеров на Вашей технике. Для этого нужно позвонить нам, согласовать время визита и привезти Ваше ТС для настройки. Первоначальная настройка осуществляется бесплатно.
Базовый набор BMS состоит из платы, на которой есть главная плата и 7 плат расширения, 3 из которых отламываются.
Каждая плата расширения обслуживает до 4 ячеек. То есть, если Вам нужна BMS для батареи 16S, то Вам нужны 4 платы расширения. Если 17S — то нужно уже 5 плат расширения.
BMS занимается балансировкой ячеек, а также передает напряжения в контроллер. BMS питается от контроллера, поэтому балансирует она только когда контроллер включен.
Контроллер, на основе напряжений, полученных от BMS, управляет процессом заряда и разряда батареи. BMS не имеет силовой части и ничего не включает и не выключает.
Порядок настройки BMS.
1. Подключить BMS к контроллеру
2. Подключить батарею к платам расширения BMS.
3. Провести настройку конфигурации BMS
Для этого необходимо зайти в меню конфигурации BMS:
Меню -> BMS setup -> BMS enable =установить в «YES».
Далее войти в Меню -> BMS setup -> BMS setup. Там осуществляются все настройки BMS.
Каждая плата расширения должна иметь свой номер. У новой BMS платы расширения нумеруются по порядку и имеют номера с 1 по 7.
В конфигурации BMS (Channel A config) необходимо указать, сколько ячеек какой модуль расширения обслуживает. Модуль расширения может быть либо отключен (0 ячеек), либо опрашивать 2,3 или 4 ячейки. Опрашивать 1 ячейку модуль расширения не может. Поэтому если у Вас на последний модуль расширения приходится одна ячейка, то с предпоследней платы берется еще одна ячейка и получается конфигурация 3 ячейки на предпоследней плате и 2 на последней.
4. Провести настройку типа батареи
В меню «Cell V config» установите нужный тип батареи (lipo, life). При выборе типа батареи подставляются типовые напряжения заряда-разряда-балансировки. При необходимости эти напржения можно изменить.
5. Проверка работы BMS и мониторинг напряжений.
Напряжения можно посмотреть как в виде цифр, так и графика.
При подключении график напряжений становится доступен при нажатии «вправо» с главного экрана.
Для просмотра напряжений в цифрах нужно зайти в Меню -> BMS setup -> BMS setup -> Battery monitor
Стрелками можно листать платы расширения (влево-вправо) и каналы (вверх-вниз).
6. Cell V calibration позволяет самостоятельно провести подстройку для более точного измерения плат расширения. Обычно в этом нет необходимости, т.к. при изготовлении каждый модуль калибруется.
Для подстройки Вам необходимо иметь точный вольтметр.
7. BMS status
Отображает текущий статус батареи (разряжена, заряжена, балансируется и т.д.)
8. Call board config
Позволяет изменить адрес платы расширения.
Для изменения адреса необходимо подключить к каналу A только одну плату расширения (все остальные платы расширения достаточно обесточить, т.е. отключить от них батарею). После этого можно изменять адрес подключенной платы расширения, следуя подсказкам на экране.
BMS имеет два канала: channel A (канал, который подключен ко всем платам расширения BMS), и канал B, выведенный на контактные площадки.
Дополнительные платы расширения можно подключать как к каналу A, так и к B, но необходимо следить, чтобы адреса плат на одном канале не дублировались.
То есть, если у Вас есть дополнительная плата с адресом 1, то ее можно подключить к пустому каналу B, а к каналу A ее можно подключить только если на нем нет платы с адресом 1. Нумерация плат начинается от шнурка.
Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.
Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
//Пины ключей Н-мостов
const int TAH = 8; //T — транзистор, А — фаза (синяя), Н — верхний ключ полумоста
const int TAL = 9; //T — транзистор, А — фаза (синяя), L — нижний ключ полумоста
const int TBH = 10; //T — транзистор, B — фаза (зелёная), H — верхний ключ полумоста
const int TBL = 11; //T — транзистор, B — фаза (зелёная), L — нижний ключ полумоста
const int TCH = 12; //T — транзистор, C — фаза (жёлтая), H — верхний ключ полумоста
const int TCL = 13; //T — транзистор, C — фаза (жёлтая), L — нижний ключ полумоста
//------------------------------------------------------------------------------------------------
//датчики холла
int HallA = 3; //пин 1 (с прерыванием)
int HallB = 1; //пин 2 (с прерыванием)
int HallC = 0; //пин 3 (с прерыванием)
//------------------------------------------------------------------------------------------------
volatile boolean vala;
volatile boolean valb;
volatile boolean valc;
//------------------------------------------------------------------------------------------------
void setup() { //Установка пинов ключей на выход pinMode(TAH, OUTPUT); pinMode(TAL, OUTPUT); pinMode(TBH, OUTPUT); pinMode(TBL, OUTPUT); pinMode(TCH, OUTPUT); pinMode(TCL, OUTPUT); //Считывание датчиков Холла vala = digitalRead(HallA); valb = digitalRead(HallB); valc = digitalRead(HallC); //Аппаратное прерывание на пинах датчиков Холла attachInterrupt (digitalPinToInterrupt(HallA), changeA, CHANGE); attachInterrupt (digitalPinToInterrupt(HallB), changeB, CHANGE); attachInterrupt (digitalPinToInterrupt(HallC), changeC, CHANGE); //LOW вызывает прерывание, когда на порту LOW //CHANGE прерывание вызывается при смене значения на порту с LOW на HIGH, и наоборот //RISING прерывание вызывается только при смене значения на порту с LOW на HIGH //FALLING прерывание вызывается только при смене значения на порту с HIGH на LOW
}
void Fases() { digitalWrite(TAH, (vala && !valb) ? HIGH : LOW); digitalWrite(TAL, (valb && !vala) ? HIGH : LOW); digitalWrite(TBH, (valb && !valc) ? HIGH : LOW); digitalWrite(TBL, (valc && !valb) ? HIGH : LOW); digitalWrite(TCH, (valc && !vala) ? HIGH : LOW); digitalWrite(TCL, (vala && !valc) ? HIGH : LOW);
void changeA() { vala = digitalRead(HallA); Fases();
}
void changeB() { valb = digitalRead(HallB); Fases();
}
void changeC() { valc = digitalRead(HallC); Fases();
}
void loop() {
}Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Выбор контроллера и его виды
Разделение устройств происходит по нескольким критериям. Так, по типу обратной связи они бывают:
- предназначенные для работы с датчиком Холла;
- работающие без него;
- универсальные.
Второе разделение – тип выходного сигнала:
- Сигнал прямоугольной формы (меандр), используется в более дешевых моделях. Позволяет получить большую скорость вращения, но повышает шум работы двигателя.
- Сигнал в виде синусоиды. Скорость меньше, зато полностью отсутствует звук вращения мотора.
Зачастую контроллер для электровелосипеда имеет маркировку или наклейку, которые обозначают его основные параметры:
Сопоставив цифры с имеющимся в наличии мотор-колесом, можно определить подходящую модель контроллера. Также следует вычислить его мощность: умножить максимальную силу тока на максимальное напряжение. Диапазон мощности контроллеров широк. Распространены универсальные модели на 350-2000 Вт.
Важно! Следует понимать, что контроллер, изготовленный для 36В батареи, нельзя подключать к более мощным аккумуляторам. Важно проверить параметр входного напряжения перед монтажом. Чтобы не столкнуться с проблемой несовместимости, рекомендуется приобретать универсальные модели, которые работают с диапазонов 48-72В или 24-100В.
Выполняемые функции
Именно контроллер формирует в обмотке статора мотор-колеса вращающееся магнитное поле и получает ответные сигналы о позиции ротора. Сигналы поступают от датчиков Холла, а при управлении моторами без датчиков позиция роторов определяется по противо-ЭДС.
К тому же, контроллер управляет электродвигателем:
- позволяет менять скорость движения – при смене положения ручки газа меняется число импульсов напряжения, подаваемых за секунду на обмотки, и вращение колеса ускоряется или замедляется;
- обеспечивает рекуперацию энергии при торможении двигателем.
Контроллер выступает в роли понижающего преобразователя, поэтому проходящий по обмоткам мотора фазный ток может быть гораздо выше батарейного тока, поступающего от АКБ к контроллеру. Именно от него зависит мощность, поступающая на двигатель. Например, при использовании мотор-колеса номинальной мощностью 1000 Вт можно кратковременно получать значения до 2000–2500 Вт.
Делаем полную замену проводки электровелосипеда — весь процесс, включая распайку контроллера. часть 1
Привет друзья.
С ростом спроса на электровелосипеды появилось множество мастеров, предлагающих услуги по электрификации велосипедов. Однако далеко не всегда эти услуги являются достаточно качественными.
После приобретения электровелосипеда у одного из таких частников, его владелец довольно быстро заметил несоответствие реального запаса хода заявленному — велосипед проезжал в режиме помощи 40 км, а на ручке газа около 20. Хотя продавец озвучивал значения 60 и 30 км. Сразу вернуть велосипед продавцу было проблематично из-за удалённости — он приобретался в другом городе.
К началу следующего сезона велосипед и вовсе перестал работать — ручка газа то срабатывала, то нет. Попытки владельца разобраться самостоятельно ни к чему не привели.
Как выяснилось, проблема была в некачественной электропроводке, а именно — в окислившихся за зиму контактах.
Коротко про сам велосипед: это складной Stels с двигателем Bafang. Аккумулятор на 48 В установлен в сумке на багажнике. Кстати, его реальная ёмкость оказалась 9,8 Ач, а заявленная была 16 Ач.
Дисплей KT-LCD3 повредился при транспортировке, и владелец планирует заменить его самостоятельно. Слева на руле находятся кнопки включения света и сигнала.
Справа на руле — ручка газа куркового типа и пульт управления дисплеем. Ручки тормоза имеют встроенные датчики — кнопки.
На кабеле двигателя уже есть разъём, это нам немного упростит задачу, так как не придётся напаивать разъём на сам двигатель.
Контроллер рассчитан на работу с напряжением 36 В и 48 В, и на максимальный ток 25 А.
Снимаем крышку — здесь видны толстые фазные провода, идущие на двигатель (синий, зелёный и жёлтый) и входящие провода питания (красный и чёрный).
В месте входа проводов в уплотнитель с внутренней стороны контроллера нанесено немного термоклея, который, по идее, должен фиксировать провода от выдёргивания, но здесь он скорее для галочки, и легко снимается пинцетом.
Предварительно разрядив конденсаторы путём замыкания контактов питания контроллера, начинаем откручивать винты на боковой стенке — они прижимают силовые транзисторы к корпусу, обеспечивая тем самым их охлаждение.
Извлекаем плату контроллера из корпуса. В этой версии используется 9 силовых транзисторов — по 3 на каждую фазу двигателя.
Зарисовываем в блокноте все провода, входящие в плату контроллера — это поможет при впайке новых кабелей.
Также зарисовываем место впайки проводов с датчиков Холла, установленных в двигателе.
Теперь можно смело выпаивать провода и прочищать отверстия отсосом для припоя. Единственное, что я решил оставить — это DC-DC преобразователь для питания фары (справа).
Он в данном случае не используется, так как фара подключена параллельно питанию контроллера и включается с кнопке на руле. Но и удалять его особого смысла не имеет — вдруг кто-то решит им воспользоваться.
Новые провода впаиваем в соответствии с записями в блокноте, а около уплотнительной резинки надеваем на них нейлоновые стяжки, для защиты от выдёргивания.
Всего получилось 4 кабеля. Первый слева — интеграционный 8-пиновый Julet, включающий все провода, идущие на руль.
Второй — разъём питания XT60. Его пришлось отпаять и затем подпаять заново, чтобы надеть защитную стеклоармированную трубку, а сверху — термоусадку.
Третий — 3-пиновый Julet для подключения датчика PAS (педальный ассистент) и четвёртый — кабель двигателя Bafang.
Преимущество кабелей Julet и Bafang в их герметичности, высокой степени влагозащиты и, как следствие, надёжности.
Наносим термоклей со всех сторон проводов внутри контроллера, для дополнительной фиксации и герметизации. Возвращаем плату в корпус и закрепляем контроллер на велосипеде.
Для минимизации количества проводов будем использовать интеграционный кабель с разъёмами Julet. С одной стороны он подключается к контроллеру, а с другой у него разъём для дисплея (5-пиновый зелёный), датчиков тормоза, ручки газа (3-пиновые жёлтые) и фары (4-пиновый синий).
Подключаем его к контроллеру и прокладываем вдоль рамы до руля. Теперь можно оттолкнуться от конечной позиции разъёмов и определить длины проводов до органов управления на руле.
Снимаем крышку на ручке газа и видим датчик Холла. К нему идут провода: красный — плюс, чёрный — минус и зелёный — сигнал.
Отпаиваем провода и заменяем кабель на Julet. Сигнальным стал белый провод. Фиксируем для надёжности термоклеем и закрываем крышку.
На ручках тормоза установлен кнопочный датчик. При нажатии ручки замыкается два контакта, и по идее, было бы достаточно 2-пинового разъёма. Но так как на интеграционном кабеле у нас 3-пиновый разъём, мы будем использовать соответствующий ответный разъём.
Белый провод — сигнальный, а чёрный — «земля», или GND. При замыкании этих двух проводов контроллер «понимает» что нажат тормоз, и отключает двигатель.
Третий провод (красный) просто изолируем и не будем использовать. Он необходим в случаях, когда на тормозах установлены датчики Холла.
Подпаяв провода, наносим на них термоклей, сверху надеваем термоусадочную трубку и греем феном. Клей вытесняет воздух и получается надёжное герметичное соединение, исключающее коррозию и последующее разрушение контактов.
Давайте взглянем на то, как была подключена светодиодная фара со встроенным сигналом. Разъём с чёрным и жёлтым проводом подключался к контроллеру, а внутри него — непосредственно к батарейному питанию. При этом оба длинных провода шли от руля до контроллера.
Не удержался и решил заглянуть внутрь фары. Чёрный провод — это «земля», красный — сигнал (гудок) и зелёный — свет.
Внутри пульта всё совсем просто — две кнопки: красная с фиксацией для включения фары и зелёная — без фиксации, для сигнала.
В этот пост больше не влезает, так что пришлось разбить статью на 2 части. Публикую её сразу же следом. Часть 2.
Для чего электровелосипеду контроллер
Наверняка почти каждый любознательный представитель мужской половины человечества в детстве имел дело с моторчиками, установленными в детских игрушках, например, электрических машинках или лодках.
Эти моторчики представляли собой двигатели постоянного тока. Для вращения к ним достаточно было подключить батарейку, и направление вращения менялось в зависимости от полярности подключения.
В том случае обмотки ротора (вращающейся части электродвигателя) подключаются к источнику питания по очереди через пару графитовых щёток, таким образом ротор приводится во вращение.
В электровелосипедах же используются бесщёточные моторы, а точнее трёхфазные асинхронные двигатели, которым недостаточно просто подать напряжение питания от батареи. На первый взгляд кажется, что всё только усложнилось, но дело вот в чём.
Во-первых, двигатели постоянного тока имеют узел, который требует обслуживания и периодического ремонта — это как раз те самые щётки и коллектор, по которому они скользят.
Во-вторых, КПД этих двигателей ниже, а вес больше. В третьих, они имеют ограниченный диапазон скоростей вращения. Всех этих недостатков трёхфазные асинхронные двигатели лишены.
Но последним требуется контроллер — устройство, обеспечивающее коммутацию обмоток строго по определённому алгоритму.
В зависимости от типа двигателя (с датчиками положения ротора или без) от контроллера к двигателю идёт либо только три силовых провода, либо к ним добавляются 5 или 6 тонких проводов.
Силовые провода — это те, которые непосредственно подключены к обмоткам двигателя. А тонкие (слаботочные) провода — это провода питания и сигналов с датчиков положения.
На фото силовые провода (синий, зелёный и жёлтый) спрятаны в стеклоармированных трубках, а слаботочные видны: синий, зелёный и жёлтый — это сигналы с датчиков положения, красный и чёрный — это питание датчиков, а белый — с датчика температуры, который спрятан под платой ближе к обмоткам.
Как выбрать контроллер для электровелосипеда?
При выборе контроллера для электровелосипеда или другого транспорта на электротяге нужно оценить рабочие характеристики устройства. Ключевые параметры обычно указаны в маркировке. По ней можно узнать:
- рабочее напряжение батареи и мощность мотора (номинал), для применения с которыми предназначено устройство;
- предельный ток АКБ;
- минимум напряжения АКБ, когда происходит отключение контроллера;
- подходящее расположение датчиков Холла в электромоторе – в электрических градусах по отношению друг к другу.
Для расчета предельной мощности контроллера находим произведение допустимых величин напряжения и силы тока. Диапазон мощности у таких приборов широкий. Для велосипедов на электротяге обычно используются модели с номиналом мощности от 350 до 2000 Вт. Для электрических скутеров – от 1000 до 4000 Вт. Для электромотоциклов – от 5000 до 10 000 Вт. Для электромобилей – от 10 000 до 50 000 Вт и более.
Мостовые драйверы
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.
Для управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился.
В это же время я наткнулся на два варианта мостовых драйверов:
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:
Печатная плата
И готовый результат
Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
Мотор-колесо – лучшее решение для электровелосипеда
Чтобы превратить свой велосипед в электротранспорт, можно купить веломотор и аккумулятор. Электродвигатель даст возможность получить возможность иметь непринужденное вращение педалей и переключение скоростных режимов. Обычно в комплекте электродвигателя есть необходимые для его подключения компоненты.
Важно определиться с выбором мотор-колеса – переднее, заднее или два сразу. Для мощного мотора лучше выбрать заднюю ось, если же вы покупаете привод для переднего колеса, то для заднего он обеспечивается периодическим вращением педалей, и такой электровелосипед будет хорош для езды по трудным трассам.
При установке двух мотор-колес вы получите полноценную полноприводную модель, великолепно чувствующую себя и на больших расстояниях, и на мокрой дороге. Если вы купили редукторное мотор-колесо, то при подъеме в гору и вращении педалей вы не будет чувствовать серьезной нагрузки. В любом случае, выбирая мотор-колесо, предварительно изучите его технические характеристики.
Преимущества наших контроллеров:
- Компактные размеры
- Встроенный Ваттметр передает на дисплей информацию о потребляемой мощности и силе батарейного тока во время движения, силе тока заряжающего батарею при торможении двигателем (регенерация), силе тока заряжающего батарею при использовании зарядного дросселя и внешнего источника питания. Также на дисплей выводится информация о реальном проценте остатка заряда батареи, а не аппроксимированное значение величины заряда батареи по ее напряжению.
- Дисплей, отображает всю привычную статистическую и динамическую информацию и позволяет осуществлять настройки контроллера без подключения его к компьютеру. Дисплей имеет встроенный авторегулируемый подогрев, который препятствует снижению скорости переключения жидких кристаллов на морозе.
- Режим торможения двигателем (регенерация) имеет алгоритм позволяющий с достаточным комфортом настроить под себя работу контроллера даже используя в качестве органа управления тормозом . кнопку (геркон). При использовании нашей ручки газа, (либо датчика холла и магнита на рычаге тормоза) . процесс торможения можно настроить так, что он будет мало отличаться от привычных гидравлических дисковых тормозов.
- Антипробуксовочная система может быть настроена индивидуально и эффективно работать при езде зимой, независимо от мощности двигателя и нагрузки на электротранспорт.
- Круиз-контроль поддерживает заданную скорость при отпущенной ручке газа независимо от встречающихся на пути подъемов.
- Возможность задавать необходимый пробег: контроллер будет сам рассчитывать насколько ограничить мощность для преодоления заданного пути. Данная функция снабжена сложным автокорректируемым алгоритмом, позволяющим водителю производить кратковременные маневры с превышением средней расчетной мощности и преодолевать подъемы.
- Автоматическое определение параметров двигателя. При подключении двигателя к контроллеру необходимо подключить питание датчиков холла соблюдая полярность и термодатчик (рекомендуется), а фазные выводы и сигнальные выводы с датчиков холла двигателя подключаются к соответствующим выводам контроллера в произвольном порядке. Все параметры двигателя контроллер определяет сам с помощью функции автонастройки (autodetect).
- Защита контроллера и двигателя от перегрева. Для защиты от перегрева контроллер имеет встроенный датчик температуры и выводы для подключения датчика температуры, который рекомендуется установить в двигатель (датчик входит в комплект поставки). Данные о температурах контроллера и двигателя выводятся на дисплей и позволяют водителю оперативно принимать решения о возможности двигаться на предельной мощности либо снизить мощность для охлаждения. Следует отметить, что когда температура приближается к критической контроллер выводит на дисплей соответствующее сообщение и начинает снижать подаваемую в двигатель мощность пока температура не понизится, т. е. ситуация аварийного отключения двигателя по перегреву практически исключается.
- Синусный, блочный и бессенсорный режимы работы. При отказе датчиков холла можно продолжать движение, используя бессенсорный режим, что позволит продолжать движение с малой скоростью (около 30 км/ч в зависимости от мотора).
- Автоматический переход в режим низкого потребления энергии (режим standby) через заданное время. В данном режиме потребляемую контроллером мощность можно сравнить с мощностью наручных часов, при активизации данной опции не требуется отключать батарею от контроллера после прекращения движения.
- Подключение БМС (Battery Monitoring Systems). Контроллер может работать совместно с устройством контроля батарейной сборки при этом на дисплей выводится информация о напряжениях на каждой ячейке, также возможна настройка устройства на ограничение верхнего и нижнего порога ячеечного напряжения. Контроллер совместно с БМС при зарядке батареи через зарядный дроссель позволяют производить балансировку ячеек по напряжению, напряжение балансировки также настраивается.
- Возможность тонкой ручной настройки контроллера: возможна полностью ручная настройка всех параметров.
- 3 полностью настраиваемых пользовательских профиля. В каждом профиле настраивается максимальное значению мощности, скорости, тока регенерации (при торможении), ускорения. Переключение между профилями производится нажатием одной кнопки.
- Шина подключения дополнительных устройств. К контроллеру могут подключаться устройства: БМС, DC-DC преобразователь, второй контроллер для привода второго колеса. устройства могут подключаться и работать одновременно.
- Переключение режимов работы ручки газа. Поворотом ручки ограничивается либо максимальная мощность, либо скорость. Также настраивается линейность отклика контроллера на поворот ручки газа.
- Возможность подключения практически любого источника постоянного тока в качестве зарядного устройства. Контроллеру может производить зарядку батареи от источника постоянного тока с напряжением более 12В и менее напряжения батареи. Опция доступна при использовании зарядного дросселя (поставляется отдельно).
- Возможность использования контроллера как мощного понижающего DC-DC преобразователя для питания от батареи различных внешних устройств, напряжение выхода при этом регулируется от 2В до напряжения батареи. Опция доступна при использовании зарядного дросселя (поставляется отдельно) и конденсатора.
- Блокировка паролем настроек и/или полного доступа к контроллеру.
- Защита от внешней среды: контроллер имеет базовую степень защиты IP54 (можно ездить в дождь), от струй воды (например, от мойки) защиты нет. Дисплей и разъемы (за исключением разъемов силовых проводов) имеют защиту IP65, т.е. струй воды не боятся.
Преимущества установки мотор-колеса
Выбор в пользу мотор-колеса позволит вам быстро и без сложностей собрать свой электровелосипед. Комплекты мотор-колес – это собранные в ступице колеса бесколлекторные двигатели различной мощности.
Достоинства установки мотор-колеса:
- Процесс установки доступен всем велолюбителя;
- Внешний вид вашего велосипеда не подвергается серьезным изменениям;
- Простота доработки – дополнительно необходима только установка аккумуляторного отсека и управляющих органов на руле;
- Бесшумная работа двигателя.
Не пропустите еще один наш материал – о том, сколько стоит электровелосипед.
Принцип работы контроллера
Информация на устройство поступает от ручки газа. Контроллер считывает данные и на их основе изменяет скорость вращения двигателя. Для увеличения срока службы агрегата, при торможении требуется плавное снижение длительности импульсов. Также полезной функцией контроллера выступает возможность включения заднего хода.
Продление жизненного цикла работы батарей требует исключения возможности глубокого разряда. Пороговый показатель заряда вшивается в контроллер и по его достижению производится отключение электромотора.
Устройство следит за температурой в системе, что исключает токовую перегрузку. При подборе контроллера важно учитывать такие показатели, как напряжение батарей, максимальный рабочий ток и пр.
Принцип работы электровелосипеда
Благодаря входящему в состав электрическому мотору, на таком велосипеде обеспечивается движение без участия ездока. Другими словами, не приходится крутить педали. Также электропривод позволяет легче преодолевать подъемы и горки, быстрее набирать скорость при разгоне.
Колеса двигаются за счет установленного электромотора. Особенно распространены модели с мотор-колесом – бесколлекторной машиной постоянного тока. При нажатии на педаль газа контроллер запускает мотор и регулирует его работу. Питание обеспечивают аккумуляторные батареи, и чем больше их емкость, тем дольше велосипед может двигаться на электрической тяге. Устанавливаются батареи на раму или багажник.
Не обходится современный велосипед и без велокомпьютера , отображающего оставшийся заряд, скорость движения, состояние батарей и прочие важные параметры.
Программируемые модели и их задачи
Программируемые контроллеры соединяются по Bluetooth со смартфоном и позволяют настраивать рабочие характеристики – от значений аккумуляторного и фазного токов до углов фазного опережения.
При выборе управляющих контроллеров учитывается и наличие второстепенных функций:
- круиз-контроля;
- обратного хода;
- возможности выбора скоростного режима или мощности;
- рекуперации энергии при торможении;
- отдельного выхода для электропитания фары и габаритных огней.
Прототип на ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
//Пины ключей Н-мостов
const int TRAplus = 8;
const int TRAminus = 9;
const int TRBplus = 10;
const int TRBminus = 11;
const int TRCplus = 12;
const int TRCminus = 13;
//датчики холла
const int HallA = 3;
const int HallB = 1;
const int HallC = 0;
boolean vala;
boolean valb;
boolean valc;
boolean pvala;
boolean pvalb;
boolean pvalc;
int pHall;
int turns;
void setup() { //Установка пинов ключей на выход pinMode(TRAplus, OUTPUT); pinMode(TRAminus, OUTPUT); pinMode(TRBplus, OUTPUT); pinMode(TRBminus, OUTPUT); pinMode(TRCplus, OUTPUT); pinMode(TRCminus, OUTPUT); //Вывод данных через серийный порт Serial.begin(9600);
}
void loop() { //Считываем датчики Холла и записываем их значение в val vala = digitalRead(HallA); valb = digitalRead(HallB); valc = digitalRead(HallC);
//Счётчик оборотов колеса. Необходима доработка if(vala && !pvala) { if(pHall == HallC) // или HallB в обратную сторону turns ; pHall = HallA; } if(valb && !pvalb) { if(pHall == HallA) // или HallC в обратную сторону turns ; pHall = HallB; } if(valc && !pvalc) { if(pHall == HallB) // или HallA в обратную сторону turns ; pHall = HallC; } digitalWrite(TRAplus, (vala && !valb) ? HIGH : LOW); //если vala==HIGH и valb==LOW, тогда записать HIGH, иначе LOW digitalWrite(TRAminus, (valb && !vala) ? HIGH : LOW); digitalWrite(TRBplus, (valb && !valc) ? HIGH : LOW); digitalWrite(TRBminus, (valc && !valb) ? HIGH : LOW); digitalWrite(TRCplus, (valc && !vala) ? HIGH : LOW); digitalWrite(TRCminus, (vala && !valc) ? HIGH : LOW); pvala = vala; pvalb = valb; pvalc = valc; Serial.print(vala); Serial.print(valb); Serial.println(valc); //Serial.println(turns/3);
}Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт.
Прототип на базе микросхемы mc33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.
Данная микросхема:
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов.
Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Схема с MC33035
Печатная плата
Готовый вариант
Разновидности контроллеров управления
По принципу взаимодействия с электромотором
Для использования с датчиками Холла
Совместимы с мотор-колесами, оснащенными датчиками Холла.
Для работы без датчиков
Совместимы с моторами без датчиков, определяют позицию роторов по противо-ЭДС.
Могут работать и с датчиками положения, и без них.
По виду выходного сигнала
Создающие сигналы прямоугольного вида (меандр)
Цена таких моделей – ниже. При их использовании обеспечивается увеличенная скорость, но из-за вибрации обмоток двигатель шумит сильнее.
Создающие чистые синусоидальные сигналы.
Дороже. Обеспечивают тихую работу мотора и небольшое снижение максимальной скорости – по сравнению с меандровым контроллером при том же напряжении АКБ.
Сознающие сигналы в виде «модифицированной синусоиды» или сглаженного меандра.
По принципу реагирования на сигналы ручки газа
Обеспечивающие управление скоростью, мощностью или крутящим моментом.
Расширение функционала
Широкий ассортимент контроллеров позволяет выбрать прибор, по максимуму подходящий под конкретные цели. Наряду с интернет-магазинами, есть специализированные мастерские, для которых не составляет проблемы вывести из контроллера управления провода под нужные заказчику функции.
Многие печатные платы имеют большой функционал, но в серийно поставляемых моделях он используется только частично. К примеру, у многих моделей не выведен провод для круиз-контроля, заднего хода, рекуперации энергии и других возможностей. Но специалисты мастерской VoltBikes могут вывести провода под конкретные задачи непосредственно при покупке контроллера.
Рекомендуемые товары
| Скорость: | 20 км/ч |
| Мощность: | 240 W |
| Запас хода: | 40 км |
| Вес: | 21 кг |
| Материал: | Алюминиевый сплав |
| Диаметр колес: | 20″ |
| Аккумулятор: | Li-Ion (Литий-ионный) 48V/10Ah |
| Время зарядки: | 4-5 часов |
| Тормоза: | Дисковые |
| Скорости: | SHIMANO 7 скоростей |
| Цвет: | Черный, Белый, Розовый жемчуг, Голубой жемчуг |
| Тип рамы: | <a href=»e-velo/skladnye»>Складная</a> |
| Дополнительно: | Сигнализация, ЖК-дисплей (уровень заряда, скорость, расстояние), Пульт Д/У, дальность хода при смешанном режиме 80 км, LED фара спереди, Сигнал, багажник |
| Нагрузка: | 100 кг |
| Тип: | <a href=»e-velo»>Электровелосипед</a> |
Цена:54900 руб44900 руб
Схема контроллера электровелосипеда
Внутри корпуса контроллера находится плата с конденсаторами, транзисторами, токоизмерительными шунтами и управляющим микропроцессором. Также там располагаются преобразователи на 12В и 5В, которые обеспечивают подачу питания на микроконтроллер и периферию (ручки, датчик Холла).
Найти схемы отдельных моделей можно в интернете. Они подразделяются на электрические и принципиальные. Разобраться с обозначениями и расположением элементов сможет только человек с соответствующими знаниями.
При подключении устройства к электровелосипеду следует учитывать распиновку контроллера. Если мотор-колесо и управляющий агрегат приобретались в комплекте, то разъемы будут совпадать и проблем не возникнет. В противном случае необходимо установить соответствие цвета провода тому или иному компоненту байка.
Обычно красный и черный провод подаются на « » и «-» аккумулятора соответственно. Толстые кабеля синего, зеленого и желтого цвета соединяются с трехфазным электродвигателем. Тонкие пять проводков идут к МК. Отдельно выделенный красный провод используется для «зажигания» – при его замыкании с плюсом аккумулятора происходит включение контроллера.
Схема назначения разъёмов контроллеров типа «стандарт», для мотор колёс, с напряжением 24, 36, 48v и мощностью 250 – 1000 ватт.
На фото слева-направо:
1. Подключение датчиков управления мотор колесом.
2. Подключение одной из ручек тормоза (любой).
3. Подключение велокомпьютера.
4. Подключение второй ручки тормоза (любой).
5. Подключение ручки газа.
6. Подключение питания контроллера от аккумулятора.
7. Подключение системы PAS.
8. Подключение кнопки ограничения скорости.
9. Подключение силовых проводов мотор колеса.
схема подключения к контроллеру стандарт
Примечания:
— Если ручки тормозов не подключены, это не влияет на работу мотор колеса, но отключаться в этом случае, оно будет только при сбросе газа.
— Отсутствие велокомпьютера не влияет на работоспособность комплекта. Если велокомпьютер не установлен, то провод зелёного цвета, выходящий отдельно из жгута проводов от ручек газа типов Z-2, Z-3, Z-8 следует вынуть из фишки и соединить с красным проводом разъёма №3 на контроллере. Это даст возможность следить за уровнем заряда аккумуляторов на индикаторе ручки газа.
— В разъёме №6, более тонкий провод красного цвета предназначен для подключения к замку зажигания. Если замок зажигания не используется, этот провод следует соединить с более толстым проводом красного цвета (соединить оба красных провода в разъёме №6)
— Если система PAS не подключена, это не влияет на работу комплекта.
— Если кнопка ограничения скорости не устанавливается, на контроллерах серии «стандарт», разъём №8, можно реализовать один из двух вариантов скорости: с ограничением – при разомкнутых проводах белого цвета в разъёме №8; без ограничения – при соединённых проводах белого цвета в разъёме №8.
— Силовые провода мотор колеса должны подключаться к проводам и изоляцией такого же цвета на контроллере.
Схема подключения
Контроллер для электроскутера, е-байка или электросамоката подключается в соответствии с прилагаемой к нему схемой. Главное – не спешить и внимательно разобраться с назначением проводов. Лучше всего покупать контроллер в комплекте с мотор-колесом, тогда их разъемы будут гарантированно совместимыми.
Общий принцип подключения выглядит так:
- Толстые провода черного и красного цвета – с соблюдением полярности подводятся к аккумуляторной батарее. При этом может появиться «искра», и даже возможно подгорание разъемов. Это нормально – так заряжаются конденсаторы на входе контроллера. Чтобы исключить искрение, достаточно ненадолго соединить контроллер и АКБ через резистор с сопротивлением в десятки Ом или воспользоваться лампочкой. Когда конденсаторы зарядятся, контроллер можно спокойно соединить с АКБ без посредников.
- Тройка толстых проводов разных цветов – обеспечивают подключение к фазным проводам 3-фазного электромотора.
- Связка из 5 тоненьких разноцветных проводов – идет к проводкам мотор-колеса, обеспечивают питание и передачу сигналов от датчиков положения.
- Отдельный красный проводок – «зажигание». При его замыкании на «плюс» АКБ происходит включение контроллера.
- Тройка тонких проводов (обычно – черный, красный и зеленый) – для подключения ручки газа.
Транзисторы и н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току.
Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.
Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением ( или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами.
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание. Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста.
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.
Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.
У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.
На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя.
Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях.
При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
A , A–, B , B–, C , C–
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.