
Что такое контроллер для электровелосипеда
Контроллер – это сложное устройство, которое выполняет следующие задачи:
- осуществляет преобразование постоянного напряжения аккумуляторов в трехфазный ток для электрического колеса;
- производит регулировку мощности двигателя, в зависимости от силы нажима на ручку газа;
- защищает двигатель.
Обратите внимание! Дополнительно, на некоторых моделях велосипедов, осуществляется обратное преобразование в момент торможения. Эту функцию обеспечивает наличие режима рекуперации и специальных тормозных ручек.
Внешне контроллер выглядит как металлическая коробочка с множеством выходящих наружу проводов. Последние соединяются с ручками управления на руле, аккумулятором, мотор-колесом, датчиком холла и бортовым компьютером.
Во время самостоятельной сборки электровелосипеда часто наблюдается типичная ошибка – контроллер размещается в непроветриваемом чехле. Во время своей работы он сильно нагревается, что может привести к оплавлению проводов и контактов, а также полной поломке устройства.
— контроллер max-e, mini-e —
инструкции — на русском / и английском
Комплекты электроники состоят из:
1. Mini-E или Max-E контроллера:
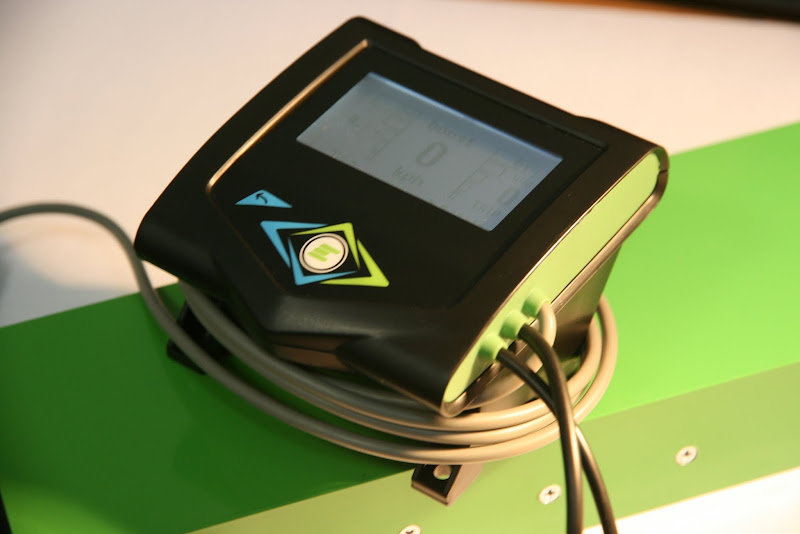
2. 2,8” монохромного графического дисплея (в базе) 
Основные характеристики контроллеров
- Синусное управление мотором
Компактные размеры
Встроенный ВаттМетер
Дисплей, отображающий всю привычную статистическую и динимическую информацию и позволяющий играть с настройками без подключения к компьютеру, PC-free так сказать.
Полностью настраеваемый реген, а приспользовании нашей ручки газа, аналоговое управление мощностью регена
Антипробуксовочная система
Круиз-контроль
Возможность задавать необходимый пробег — контроллер будет сам расчитывать насколько ограничить мощность для преодаления заданного расстояния
Полуавтоматический подбор комбинации фазных и холловых проводов — делается в ручную, но через дисплей, все что нужно сделать, это правильно подключить питание холлов, остальное происходит электрически
Защита мотора и конроллера от перегрева – термодатчик установлен в контроллере, который также имеет порт для подключения термодатчика, располагающегося в моторе, что позволяет мониторить температуру в нем и соотвествующим образом управлять вкачаваемой мощностью (сначала появляется сообщение на экране, что температура подбирается к критической отметке, затем контроллер ограничивает мощность пока температура не опустится до нужного уровня)
Синусный, блочный и бессенсорный режимы работы (в последний конроллер переходит автоматически, в случае отказа холлов)
Автоматическое отключение системы через заданное время
Самодиагностика системы
Интеграция с БМС — можно мониторить состояние батареи и каждой ячейки в отдельности, устанавливать напряжения верхней и нижней отсечки
Возможность тонкой настройки контроллера:
— коррекция углов холлов
— настройка углов опережения
— и т.д.
3 полностью настраиваемых (мощность, скорость, реген, макс. ускорение) мощностных профиля, переключение между которыми возможно нажатием одной кнопки
Шина подключения дополнительных устройств (БМС, DC-DC преобразователя и второго контроллера для 2WD); несколько устройств могут подключаться одновременно.
Возможность переключения режимов работы ручки газа — контролирует либо мощность, либо скорость. Калибровка линейности ручки и задание прогрессии отклика.
Возможность подключения зарядного устройства к контроллеру (напряжение ЗУ должно быть более 12В и менее напряжения батареи). Опции заряда, в т.ч. установка зарядного тока. Требуется внешняя катушка индуктивности (опция).
Возможность работы как мощный понижающий DC-DC преобразователь. Требуется внешняя катушка и конденсатор.
Блокировка паролем настроек и/или полного доступа к контроллеру.
Для скоростных моторов: развитие скорости до 70000 электрических RPM
При эксплуатации контроллера на больших фазных токах напряжение питания не должно превышать 90v. На экстремальных токах напряжение с учетом просадки батареи не должно превышать 85v.
Контроллер имеет базовую степень защиты IP54 (можно ездить в дождь). От струй воды (например, от мойки) защиты нет. Если нужна полная защита от струй воды — можно крышки контроллера и кабель-вводы обработать герметиком.
Дисплей и разъемы (кроме разъемов силовых проводов) уже имеют защиту IP65, т.е. струй воды не боятся.
Официальные розничные цены комплекта (контроллер дисплей): Mini-e — 13950 руб. /
Max-e — 23950 руб. /
Краткая инфа: на русском
Основные характеристики БМС:
Предназначена для любого типа аккумуляторных батарей до 100В и 32S6P БМС будет состоять из основной платы, к которой может быть присоединено до 8-ми вспомогательных плат каждая на 4S6P. Вспомогательные платы будут оснащены JSTXH коннекторами для упрощения коммутации Li-Po аккумуляторов. На рисунке показаны три вспомогательные платы.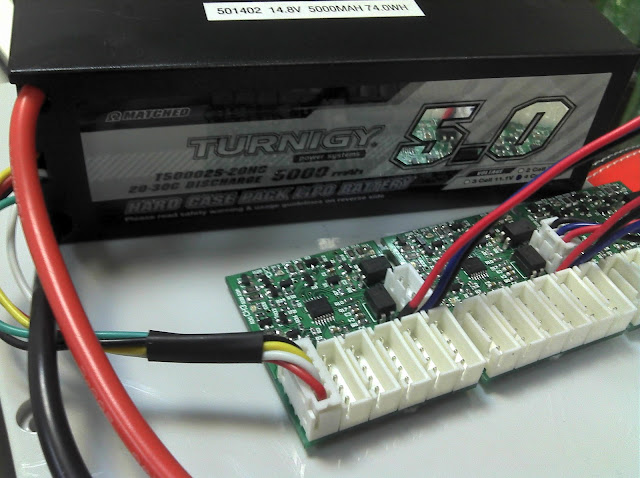
Возможность устанавливать напряжение верхней и нижней отсечки
Может быть использована без контроллера, но с предустановленными настройками
Основные характеристики ручки газа:
Возможность аналогового управления регеном, либо вращением ручки в обратную сторону, либо нажатием правой ручки тормоза. Функция кик-даун для активации профиля максимальной мощности в экстренных ситуациях путем проворота ручки (будет ощутимая ступенька по усилию) 6 назначаемых кнопок
Основные характеристики DC-DC преобразователя:
Входное напряжение 20-100В /
Выходное напряжение 10-90В
Выходная сила тока 10-25 A в зависимости от входного напряжения Выходное напряжение и ток настраиваются через дисплей BMS состоит из основной платы и плат расширения. Плата расширения обслуживает 4 ячейки. Умеет балансировать и измерять напряжение каждой ячейки. Этих плат берется столько, сколько надо для контроля всех ячеек. Максимальная конфигурация — в опытных образцах 32S, но в официальной версии планируется больше.
При использовании контроллера пришли к выводу, что силовая часть в BMS не нужна — контроллер умеет заряжать батарею, так и входить в спячку (режим низкого энергопотребления). Поэтому сделали BMS модульной для возможности набирать требуемую конфигурацию и не переплачивать за ненужное.
Основная плата — плата с процессором, которой для работы нужен либо контроллер, либо силовая плата BMS (если нужно использовать BMS автономно, без контроллера).
Соответственно, работает с lipo, life и др. ячейками с напряжением ячейки от 2 до 5 вольт.
Связаться с нами можно по телефону: (495) 215-2878, в рабочие дни с 11 до 18:30 (поддержка и сервис) Можно позвонить просто из браузера
Мы находимся по адресу ул. Введенского, д.8 (ст.м. калужская или беляево) В случае проблем с начальной настройкой мы осуществляем первоначальную настройку mini-e и max-e контроллеров на Вашей технике. Для этого нужно позвонить нам, согласовать время визита и привезти Ваше ТС для настройки. Первоначальная настройка осуществляется бесплатно.
Базовый набор BMS состоит из платы, на которой есть главная плата и 7 плат расширения, 3 из которых отламываются.
Каждая плата расширения обслуживает до 4 ячеек. То есть, если Вам нужна BMS для батареи 16S, то Вам нужны 4 платы расширения. Если 17S — то нужно уже 5 плат расширения.
BMS занимается балансировкой ячеек, а также передает напряжения в контроллер. BMS питается от контроллера, поэтому балансирует она только когда контроллер включен.
Контроллер, на основе напряжений, полученных от BMS, управляет процессом заряда и разряда батареи. BMS не имеет силовой части и ничего не включает и не выключает.
Порядок настройки BMS.
1. Подключить BMS к контроллеру
2. Подключить батарею к платам расширения BMS.
3. Провести настройку конфигурации BMS
Для этого необходимо зайти в меню конфигурации BMS:
Меню -> BMS setup -> BMS enable =установить в «YES».
Далее войти в Меню -> BMS setup -> BMS setup. Там осуществляются все настройки BMS.
Каждая плата расширения должна иметь свой номер. У новой BMS платы расширения нумеруются по порядку и имеют номера с 1 по 7.
В конфигурации BMS (Channel A config) необходимо указать, сколько ячеек какой модуль расширения обслуживает. Модуль расширения может быть либо отключен (0 ячеек), либо опрашивать 2,3 или 4 ячейки. Опрашивать 1 ячейку модуль расширения не может. Поэтому если у Вас на последний модуль расширения приходится одна ячейка, то с предпоследней платы берется еще одна ячейка и получается конфигурация 3 ячейки на предпоследней плате и 2 на последней.
4. Провести настройку типа батареи
В меню «Cell V config» установите нужный тип батареи (lipo, life). При выборе типа батареи подставляются типовые напряжения заряда-разряда-балансировки. При необходимости эти напржения можно изменить.
5. Проверка работы BMS и мониторинг напряжений.
Напряжения можно посмотреть как в виде цифр, так и графика.
При подключении график напряжений становится доступен при нажатии «вправо» с главного экрана.
Для просмотра напряжений в цифрах нужно зайти в Меню -> BMS setup -> BMS setup -> Battery monitor
Стрелками можно листать платы расширения (влево-вправо) и каналы (вверх-вниз).
6. Cell V calibration позволяет самостоятельно провести подстройку для более точного измерения плат расширения. Обычно в этом нет необходимости, т.к. при изготовлении каждый модуль калибруется.
Для подстройки Вам необходимо иметь точный вольтметр.
7. BMS status
Отображает текущий статус батареи (разряжена, заряжена, балансируется и т.д.)
8. Call board config
Позволяет изменить адрес платы расширения.
Для изменения адреса необходимо подключить к каналу A только одну плату расширения (все остальные платы расширения достаточно обесточить, т.е. отключить от них батарею). После этого можно изменять адрес подключенной платы расширения, следуя подсказкам на экране.
BMS имеет два канала: channel A (канал, который подключен ко всем платам расширения BMS), и канал B, выведенный на контактные площадки.
Дополнительные платы расширения можно подключать как к каналу A, так и к B, но необходимо следить, чтобы адреса плат на одном канале не дублировались.
То есть, если у Вас есть дополнительная плата с адресом 1, то ее можно подключить к пустому каналу B, а к каналу A ее можно подключить только если на нем нет платы с адресом 1. Нумерация плат начинается от шнурка.
Dc brushless motor controller — купить недорого в интернет-магазине, цены
Пользователь, оставляя заявку на интернет-сайте https://huaweidevices.ru,
https://jp.huaweidevices.ru, https://cn.huaweidevices.ru
принимает настоящее Согласие на обработку персональных данных (далее – Согласие).
Действуя свободно, своей волей и в своем интересе, а также подтверждая свою
дееспособность, пользователь дает согласие на обработку своих персональных данных для компании Shopozz Corp., 723 South Casino Center Blvd., 2nd Floor Las Vegas, NV 89101-6716 на сайте https://huaweidevices.ru, а также ООО «СКИФМЬЮЗИК», ИНН 6315642316 на территории РФ, в целях предоставления посреднических услуги по покупке товаров в интернет-магазинах и на аукционах США.
- Данное Согласие дается на обработку персональных данных, как без использования средств
автоматизации, так и с их использованием. - Согласие дается на обработку следующих моих персональных данных:
- 1) Персональные данные, не являющиеся специальными или биометрическими: номера
контактных телефонов; адреса электронной ̆ почты; место работы и занимаемая
должность; пользовательские данные (сведения о местоположении; тип и версия ОС; тип
и версия Браузера; тип устройства и разрешение его экрана; источник откуда пришел на
сайт пользователь; с какого сайта или по какой рекламе; язык ОС и Браузера; какие
страницы открывает и на какие кнопки нажимает пользователь; ip-адрес.
- 1) Персональные данные, не являющиеся специальными или биометрическими: номера
- Персональные данные не являются общедоступными.
- Цель обработки персональных данных: обработка входящих запросов физических лиц с
целью оформления заказов; аналитики действий физического лица на веб-сайте и
функционирования веб-сайта; проведение рекламных и новостных рассылок. - Основанием для обработки персональных данных является: ст. 24 Конституции Российской
Федерации; ст.6 Федерального закона №152-ФЗ «О персональных данных»; Устав
«Shopozz Corp.»; настоящее согласие на обработку персональных данных. - В ходе обработки с персональными данными будут совершены следующие действия: сбор;
запись; систематизация; накопление; хранение; уточнение (обновление, изменение);
извлечение; использование; передача (распространение, предоставление, доступ);
блокирование; удаление; уничтожение. - Персональные данные обрабатываются до отписки физического лица от рекламных и
новостных рассылок. Также обработка персональных данных может быть прекращена по
запросу субъекта персональных данных. Хранение персональных данных, зафиксированных
на бумажных носителях осуществляется согласно Федеральному закону №125-ФЗ «Об
архивном деле в Российской Федерации» и иным нормативно правовым актам в области
архивного дела и архивного хранения. - Согласие может быть отозвано субъектом персональных данных или его представителем
путем направления письменного заявления «Shopozz Corp.» или его
представителю по адресу, указанному в начале данного Согласия. - В случае отзыва субъектом персональных данных или его представителем согласия на
обработку персональных данных «Shopozz Corp.» вправе продолжить обработку
персональных данных без согласия субъекта персональных данных при наличии оснований,
указанных в пунктах 2 – 11 части 1 статьи 6, части 2 статьи 10 и части 2 статьи 11
Федерального закона №152-ФЗ «О персональных данных» от 27.07.2006 г - Настоящее согласие действует все время до момента прекращения обработки персональных
данных, указанных в п.7 и п.8 данного Согласия.
Выбор контроллера и его виды
Разделение устройств происходит по нескольким критериям. Так, по типу обратной связи они бывают:
- предназначенные для работы с датчиком Холла;
- работающие без него;
- универсальные.
Второе разделение – тип выходного сигнала:
- Сигнал прямоугольной формы (меандр), используется в более дешевых моделях. Позволяет получить большую скорость вращения, но повышает шум работы двигателя.
- Сигнал в виде синусоиды. Скорость меньше, зато полностью отсутствует звук вращения мотора.
Зачастую контроллер для электровелосипеда имеет маркировку или наклейку, которые обозначают его основные параметры:
Сопоставив цифры с имеющимся в наличии мотор-колесом, можно определить подходящую модель контроллера. Также следует вычислить его мощность: умножить максимальную силу тока на максимальное напряжение. Диапазон мощности контроллеров широк. Распространены универсальные модели на 350-2000 Вт.
Важно! Следует понимать, что контроллер, изготовленный для 36В батареи, нельзя подключать к более мощным аккумуляторам. Важно проверить параметр входного напряжения перед монтажом. Чтобы не столкнуться с проблемой несовместимости, рекомендуется приобретать универсальные модели, которые работают с диапазонов 48-72В или 24-100В.
Выполняемые функции
Именно контроллер формирует в обмотке статора мотор-колеса вращающееся магнитное поле и получает ответные сигналы о позиции ротора. Сигналы поступают от датчиков Холла, а при управлении моторами без датчиков позиция роторов определяется по противо-ЭДС.
К тому же, контроллер управляет электродвигателем:
- позволяет менять скорость движения – при смене положения ручки газа меняется число импульсов напряжения, подаваемых за секунду на обмотки, и вращение колеса ускоряется или замедляется;
- обеспечивает рекуперацию энергии при торможении двигателем.
Контроллер выступает в роли понижающего преобразователя, поэтому проходящий по обмоткам мотора фазный ток может быть гораздо выше батарейного тока, поступающего от АКБ к контроллеру. Именно от него зависит мощность, поступающая на двигатель. Например, при использовании мотор-колеса номинальной мощностью 1000 Вт можно кратковременно получать значения до 2000–2500 Вт.
Дополнительные функции контроллера
Кроме того на плате есть точки дополнительных функций, которые не выведены в общем пучке проводов. Функция срабатывает при подключении точки к общему проводу (GND). (Любой черный провод на плате это общий или GND).
Точки подписаны следующим образом:
| BH | тормоз высокий (срабатывает при подключении на 5 В) |
| BL | тормоз низкий (срабатывает при подключении на GND) |
| DD | реверс (задний ход, если позволяет конструкция мотора) |
| HI | понижение максимальной скорости |
| LO | повышение максимальной скорости |
| XH | круиз контроль (поддержка заданной скорости) |
| TS | вход сигнала ручки газа |
| XX | обучение (для входа в режим нужно соединить две точки) |
| EBS | торможение двигателем (активируется по сигналу с датчика тормоза) |
| а3 | противоугонка, режим паркинг (при подключенной батарее контроллер тормозит двигатель и не даёт укатить аппарат) |
Возможно кому-то эти функции пригодятся для своих проектов.
Некоторые термины, используемые в тематике bldc и esc
При изучении принципов работы BLDC двигателей и контроллеров ESC вы можете столкнуться с некоторыми терминами, используемыми в данной тематике. Кратко рассмотрим основные из этих терминов.
Braking (торможение) – определяет насколько быстро BLDC двигатель может остановить свое вращение. Это особенно актуально для летающих средств (дронов, геликоптеров и т.д.) поскольку они вынуждены часто изменять количество оборотов двигателя в минуту чтобы маневрировать в воздухе.
Soft Start (плавный пуск, старт) – эта способность особенно важна для BLDC двигателей когда вращающий момент от него на исполнительный механизм (колесо, винт и т.д.) передается через механизм передач, обычно состоящий из шестерен.
Плавный пуск означает, что двигатель не начнет сразу вращаться с максимальной скоростью, а будет увеличивать свою скорость вращения постепенно независимо от того, с какой скоростью нарастает управляющее воздействие. Плавный пуск значительно снижает износ шестерен, входящих в передаточный механизм.
Motor Direction (направление вращения двигателя) – обычно направление вращения BLDC двигателей не изменяется в процессе эксплуатации, однако во время сборки и тестирования работы изделия может потребоваться изменение направления вращения двигателя, обычно это можно сделать просто поменяв местами любые два провода двигателя.
Low Voltage Stop (остановка при низком напряжении питания). Обычно BLDC двигатели калибруют так, чтобы при одинаковом уровне управляющего воздействия скорость его вращения была постоянной. Однако этого трудно достигнуть потому что со временем напряжение питающей батареи уменьшается.
Чтобы предотвратить это обычно контроллеры ESC программируют таким образом чтобы они останавливали работу BLDC двигателя когда напряжение питающей батареи опускается ниже определенной границы. Особенно эта функция полезна при использовании BLDC двигателей в дронах.
Response time (время отклика, время реакции, время ответа). Означает способность двигателя быстро изменять скорость вращения при изменении управляющего воздействия. Чем меньше время реакции, тем лучше контроль над двигателем.
Advance (движение вперед). Эта проблема является своеобразной «ахиллесовой пятой» для BLDC двигателей. Все BLDC двигатели имеют хотя бы небольшой подобный баг. Эта проблема вызвана тем, что когда катушка статора запитана ротор движется вперед поскольку на нем есть постоянный магнит.
И когда управляющее напряжение с этой катушки снимают (чтобы подать его на следующую катушку) ротор продвигается вперед немного дальше чем предусмотрено логикой функционирования двигателя. Это нежелательное продвижение двигателя вперед в англоязычной литературе называют “Advance” и оно может приводить к нежелательным вибрациям, нагреву и шуму при работе двигателя. Поэтому хорошие контроллеры ESC стараются по возможности устранить этот эффект в работе BLDC двигателей.
Обучение контроллера
Для того, чтобы контроллер понимал, в какую сторону вращать мотор, определить угол датчиков холла, необходимо произвести обучение. Обучение нужно провести только при первом включении системы, в дальнейшем вся нужная информация будет храниться в энергонезависимой памяти контроллера.
В процессе обучения также контроллер понимает на какое напряжение установлена батарея – 36 или 48 В. Эту информацию он использует, чтобы отключить питание системы, когда она окажется разряжена. Функция защиты от переразряда присутствует и в BMS литиевой батареи, так что защита получается двойная и что-то из них сделает это первым.
При обучении необязательно, чтобы батарея была заряжена полностью. Ему достаточно любого значения из диапазона возможного напряжения. У батарей номиналом 36 В этот диапазон 30…42 В, у батарей 48 В – 39…54,6 В. Так как напряжение 48-ми вольтовой батареи при низком заряде залазит в область напряжений батареи 36-ти вольт, нужно её подзарядить перед обучением хотя-бы до 43 вольт.
Процесс обучения:
- Нужно вывесить колесо, чтобы оно могло свободно вращаться
- Соединить два провода обучения
- Подключить батарею
- Включить “зажигание” (красный тонкий провод на батареи)
- Если колесо вращается в верном направлении – выключаем “зажигание” и разъединяем провода обучения. Обучение закончено
- Если колесо вращается не в ту сторону, размыкаем провода обучения и соединяем снова, направление вращения изменится, выключаем “зажигание” и разъединяем провода обучения. Обучение закончено
Объяснение программы для arduino
Полный код программы приведен в конце статьи, здесь же мы рассмотрим только его основные фрагменты.
Для управления BLDC двигателем мы будем формировать ШИМ сигнал с частотой 50 Гц и изменяемым от 0 до 100% коэффициентом заполнения. Значение коэффициента заполнения будет управляться с помощью потенциометра. То есть, вращая потенциометр, мы будем управлять скоростью вращения двигателя.
Как уже указывалось, управление BLDC двигателем очень похоже на управление сервомотором с помощью ШИМ 50 Гц, поэтому в данном случае мы будем использовать ту же самую библиотеку, которую использовали для управления сервомотором. Если вы начинающий в изучении платформы Arduino, то перед дальнейшим прочтением данной статьи рекомендуем вам изучить принципы формирования ШИМ сигнала в Arduino и подключение сервомотора к плате Arduino.
ШИМ сигнал можно генерировать только на тех цифровых контактах платы Arduino, которые обозначены символом ~. В нашей схеме мы будем управлять контроллером ESC с контакта 9 платы Arduino, поэтому следующей командой мы прикрепим контроллер ESC к этому контакту:
Коэффициент заполнения ШИМ (от 0 до 100%) управляется с помощью положения ручки потенциометра. То есть когда на выходе потенциометра у нас будет 0V (0 на выходе АЦП), у нас коэффициент заполнения будет равен 0, а когда на выходе потенциометра будет 5V (1023 на выходе АЦП), коэффициент заполнения ШИМ будет равен 100%. Поэтому мы будем использовать функцию, которая будет считывать значение с выхода АЦП контакта A0.
Затем мы должны конвертировать полученное значение (оно будет в диапазоне от 0 до 1023) в диапазон от 0 до 180. В дальнейшем значение 0 у нас будет означать 0% коэффициент заполнения ШИМ, а значение 180 – 100% коэффициент заполнения ШИМ. Конвертация значения из диапазона 0-1023 в диапазон 0-180 будет осуществляться с помощью функции:
В дальнейшем мы должны передать это значение в функцию управления двигателем, чтобы сформировать соответствующий ШИМ сигнал на необходимом нам контакте. Поскольку мы дали нашему серво объекту имя ESC, то команда для управления им будет выглядеть следующим образом:
Принцип действия bldc двигателей
Бесколлекторные электродвигатели постоянного тока (BLDC двигатели) в настоящее время часто используются в потолочных вентиляторах и электрических движущихся транспортных средствах благодаря их плавному вращению. В отличие от других электродвигателей постоянного тока BLDC двигатели подключаются с помощью трех проводов, выходящих из них, при этом каждый провод образует свою собственную фазу, то есть получаем трехфазный мотор.
Хотя BLDC относятся к двигателям постоянного тока они управляются с помощью последовательности импульсов. Для преобразования напряжения постоянного тока в последовательность импульсов и распределения их по трем проводникам используется контроллер ESC (Electronic speed controller).
В любой момент времени питание подается только на две фазы, то есть электрический ток заходит в двигатель через одну фазу, и покидает его через другую. Во время этого процесса запитывается катушка внутри двигателя, что приводит к тому, что магниты выравниваются по отношению к запитанной катушке.
Затем контроллер ESC подает питание на другие два провода (фазы) и этот процесс смены проводов, на которые подается питание, продолжается непрерывно, что заставляет двигатель вращаться. Скорость вращения двигателя зависит от того как быстро подается энергия на катушку двигателя, а направление вращения – от порядка смены фаз, на которые поочередно подается питание.
Существуют различные типы BLDC двигателей – давайте рассмотрим основные из них. Различают Inrunner и OutRunner BLDC двигатели. В Inrunner двигателях магниты ротора находятся внутри статора с обмотками, а в OutRunner двигателях магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками.
То есть в Inrunner (по этому принципу конструируется большинство двигателей постоянного тока) ось внутри двигателя вращается, а оболочка остается неподвижной. А в OutRunner сам двигатель вращается вокруг оси с катушкой, которая остается неподвижной.
OutRunner двигатели особенно удобны для применения в электрических велосипедах, поскольку внешняя оболочка двигателя непосредственно приводит в движение колесо велосипеда, что позволяет обойтись без механизма сцепления. К тому же OutRunner двигатели обеспечивают больший крутящий момент, что делает их также идеальным выбором для применения в электрических движущихся средствах и дронах. Поэтому и в этой статье мы будем рассматривать подключение к платы Arduino двигателя OutRunner типа.
Примечание: существует еще такой тип BLDC двигателей как бесстержневой (coreless), который находит применение в «карманных» дронах. Эти двигатели работают по несколько иным принципам, но рассмотрение принципов их работы выходит за рамки данной статьи.
BLDC двигатели с датчиками (Sensor) и без датчиков (Sensorless). Для BLDC двигателей, которые вращаются плавно, без рывков, необходима обратная связь. Поэтому контроллер ESC должен знать позиции и полюса магнитов ротора чтобы правильно запитывать статор.
Эту информацию можно получить двумя способами: первый из них заключается в размещении датчика Холла внутри двигателя. Датчик Холла будет обнаруживать магнит и передавать информацию об этом в контроллер ESC. Этот тип двигателей называется Sensor BLDC (с датчиком) и он находит применение в электрических движущихся транспортных средствах.
Второй метод обнаружения позиции магнитов заключается в использовании обратной ЭДС (электродвижущей силы), генерируемой катушками в то время когда магниты пересекают их. Достоинством этого метода является то, что он не требует использования каких либо дополнительных устройств (датчик Холла) – фазовый провод самостоятельно используется в качестве обратной связи благодаря наличию обратной ЭДС.
Работа схемы
Схема подключения BLDC двигателя и контроллера ESC к плате Arduino представлена на следующем рисунке.
Как видите, схема достаточно проста. Контроллеру ESC необходим источник питания с напряжением 12V и током как минимум 5A. Для питания схемы можно использовать адаптер или Li-Po батарейку. Три фазы (провода) BLDC двигателя необходимо подсоединить к трем выходным проводам контроллера ESC – неважно в каком порядке.
Предупреждение: у некоторых контроллеров ESC нет выходных проводов, в этом случае вам необходимо будет припаивать провода от BLDC двигателя к контактам контроллера ESC. Обязательно изолируйте эти оголенные места (пайки) с помощью изоляционной ленты потому что через эти провода возможно протекание достаточно больших токов и любое короткое замыкание может привести к повреждению двигателя и контроллера ESC.
Схема BEC (Battery Eliminator circuit) в контроллере ESC будет самостоятельно обеспечивать (регулировать) постоянное напряжение 5V, поэтому его можно непосредственно использовать для питания платы Arduino. Для управления скоростью вращения двигателя в схеме используется потенциометр, подключенный к контакту A0 платы Arduino.
Внешний вид собранной конструкции показан на следующем рисунке.
Схема подключения и распиновка контроллера электросамоката
К контроллеру подсоединяется электромотор и остальные электрокомпоненты самоката. Для их подключения используются многожильные соединительные провода в термостойкой изоляции из силикона. Совместимость контроллера с электродвигателем и АКБ электросамоката определяется по максимальному току, напряжению батареи и другим рабочим параметрам.
Рассмотрим схему подключения контроллера электросамоката и функции контактов на примере устройства, разработанного для управления трехфазными электромоторами с рабочими параметрами 36 В и 350 Вт. В таблице приведен перечень электрических разъемов контроллера, их назначение и цвета изоляционного покрытия используемых в них проводов.
№ п/п | Назначение | Цвет изоляции |
1 | Подключение к ручкам тормоза и стоп-сигналу. К общему жгуту проводов подключено 2 разъема. | Черный, желтый, красный. |
2 | Подсоединение к АКБ. | Черный, красный. |
3 | Ограничение предельной скорости. | 2 белых провода. |
4 | Подсоединение к датчикам Холла электромотора. | Черный, синий, зеленый, желтый, красный. |
5 | Подсоединение к системе помощи педалям PAS. | Черный, зеленый, красный. |
6 | Соединение с замком зажигания или пультом управления. | Черный, синий, зеленый, красный. |
7 | Подключение к ручке газа. | Зеленый, черный, красный. |
8 | Круиз-контроль. | 2 синих. |
9 | Электропитание мотора – используется 3 проводка. | Зеленый, синий, желтый. |
Алгоритм подключения и настройки контроллера электросамоката таков:
- Гнездо №9 подключаем к силовым проводам с идентичным изоляционным покрытием на электромоторе, а разъем №4 – к соответствующему ему гнезду от управляющих проводков.
- В случае применения пульта управления – подсоединяем его к штепселю №6. Если пульта управления нет, подсоединяем замок зажигания к красному и синему проводу гнезда №6.
- Ручку газа подсоединяем к штепселю №7, рукоятки тормоза и стоп-сигнал (при его наличии) – к №1.
- Чтобы ограничить предельную скорость, замыкаем 2 белых проводка в разъеме №3. Чтобы иметь возможность управлять возможностью ограничения предельной скорости, подключаем к нему двухпозиционный выключатель К-2Р.
- Для активации круиз-контроля подключаем кнопку на ручке газа к разъему №8. В дальнейшем для активации этой функции достаточно будет нажать и удержать кнопку на пару секунд, а для отключения – нажать на рукоятку тормоза.
- При наличии системы PAS – подсоединяем ее контакты к гнезду №5.
- Подключаем к АКБ разъем №2. Не допускаем замыкания черного и красного проводов питания!
При покупке готового комплекта компонентов для электрификации самоката отпадает вопрос, как проверить контроллер электросамоката и коммутацию его разъемов. Такая проверка выполняется в процессе предпродажной подготовки, и проводки на ответных гнездах подключаемого оборудования соответствуют цветам, обозначенным в схеме.